
Abstract
Magnetorheological (MR) fluid is among the smart materials that can change its default properties with the influence of a magnetic field. Typical application of an MR fluid based device involves an adjustable damper which is commercially known as an MR fluid damper. It is used in vibration control as an isolator in vehicles and civil engineering applications. As part of the device development process, proper understanding of the device properties is essential for reliable device performance analysis. This study introduce an accurate and fast prediction model to analyse the dynamic characteristics of the MR fluid damper. This study proposes a new modelling technique called Extreme Learning Machine (ELM) to predict the dynamic behaviour of an MR fluid damper hysteresis loop. This technique was adopted to overcome the limitations of the existing models using Artificial Neural Networks (ANNs). The results indicate that the ELM is extremely faster than ANN, with the capability to produce high accuracy prediction performance. Here, the hysteresis loop, which represents the relationship of force-displacement for the MR fluid damper, was modelled and compared using three different activation functions, namely, sine, sigmoid and hard limit. Based on the results, it was found that the prediction performance of ELM model using the sigmoid activation functions produced highest accuracy, and the lowest Root Mean Square Error (RMSE).
1 Introduction
Magneto-rheological (MR) fluid is a smart fluid material comprising soft magnetic particles and stabilizers suspended in a carrying fluid [1]. The MR fluid is able to transform from a liquid state to a semi-solid state, depending on the magnetic field reversibly within milliseconds [2], which results in controllable field strength. Studies have shown that MR fluids also have relatively low power, high shear stress, good temperature stability and fast response time [1]. Due to its unique MR effect, the MR fluid has been extensively applied over a wide range of vibration control applications, from automobiles, to railway vehicles and civil structures [3, 4]. A typical MR damper may have an accumulator, electromagnetic coil, piston, and importantly, MR fluid (Figure 1). It requires an electric current to modulate the magnetic field so that the damping properties of the MR fluid can effectively control the operation of the MR damper. Prominent applications utilizing the MR damper can be seen in the field of civil engineering. A study on the MR damper was done by Wang et al., [5] where the damper was placed on a bridge's cable in Dongting Lake for about 10 years. These 10-year operation of the MR damper manufactured by Lord company shows that the damping performance only decreased about 29.8% of the damping force since it was first operated. The MR fluid damper is among the most discussed applications of MR fluid, and works as a vibration isolator that is loaded with MR fluids and controlled by an electromagnetic field [6].
![Figure 1 A typical MR damper [10]](/https/www.degruyter.com/document/doi/10.1515/eng-2021-0053/asset/graphic/j_eng-2021-0053_fig_001.jpg)
A typical MR damper [10]
The MR fluid damper is typically applied in the perspective of a semi-active device as a controllable damper in vibration control systems [7]. The semi-active suspension based on MR fluid can quickly regulate the damping coefficient with a reaction time of only a few milliseconds. This damper only requires little power which does not exceed 20 W per damper, to significantly change the suspension damping force [8]. This is due to fast the reversible rheology characteristics of the MR fluid in a high magnetic field, where the damping force of the MR damper contributes by the uncontrollable MR fluid zero magnetic field viscosity and the Coulomb damping force by the controllable external magnetic field respectively [9].
It is well-known that precise mathematical modeling is necessary to control the damping force produced by the MR fluid damper [11]. The existing parametric models are difficult to adapt, as there are many parameters to be implemented [12]. Additionally, these models consume a great deal of time in terms to be developed [6]. However, for non-parametric models, the issue is on the training time during the development process, where a typical ANN approach requires a relatively longer duration. This is considered as a shortcoming that is worthy to be highlighted. Slow gradient-based learning algorithms are extensively applied to train the ANN; all the parameters of the networks are tuned iteratively using this learning algorithm. It shows that traditional learning algorithms are slower than required [11]. Hence, to the best of the researcher's knowledge, an investigation on whether the MR fluid damper model using the ELM method is expected to overcome the limitations of the ANN prediction models has not yet been reported in the literature thus far.
ELM have been used to model the characteristics of the MR fluid actuator. A SLFN network structure was developed to predict the field-dependent shear stress with input variables, magnetic field and shear rate. The results demonstrate that the model achieves better accuracy compared to conventional mathematical models such as the Herschel-Bulky and Robertson-Stiff model [2]. Besides, Bahiuddin et al. [13] integrated a basic ELM model with PSO to minimize the use of hidden nodes, while maintaining an error of less than 1% in predicting the shear stress of the MR fluid. However, the drawback is that the training time increases due to the optimization algorithm. MR grease, which is slightly different from MR fluid properties, has been modelled in terms of its rheological properties using ELM [14]. The model was able to predict the prominent parameters such as shear stress, and also the derived parameters which are dynamic yield stress and yield stress magnetorheological effects, by including various CIP compositions as the ones in the input model. Other than MR materials, ELM was applied in a cubic crystal by integrating basic ELM learning algorithms with a grid search (GS) hyper-parameter optimization method to predict the lattice parameters and describe the material crystal structure [15]. In addition, an ELM algorithm was employed to predict the tribological characteristics of biodiesel from palm sesame oil by using a cuckoo search optimization algorithm [16]. Besides, various applications using ELM were published [17,18,19,20]. The fast prediction and good generalization performance demands ELM to be employed in many applications.
Therefore, the purpose of this study is to improve the modeling technique to model the MR fluid damper hysteresis loop by describing the device characteristics such as damping force. The influence of the magnetic field on the device structure is crucial to determine the overall performance of the device. Hence, this work proposed a novel modeling technique for an MR fluid damper using the ELM method to predict the force-displacement performance through a hysteresis loop. Here, several activation function performances were compared. The proposed prediction model was analyzed based on its prediction accuracy performance via the Root Mean Square Error (RMSE), with respect to experiment data. Moreover, the correlation between input and predicted output (i.e. regression fitness) was also analysed through the resultant R2 values for each selected activation function.
![Figure 2 MR damper on cable bridge [5]](/https/www.degruyter.com/document/doi/10.1515/eng-2021-0053/asset/graphic/j_eng-2021-0053_fig_002.jpg)
MR damper on cable bridge [5]
![Figure 3 MR damper based prosthetic device [21]](/https/www.degruyter.com/document/doi/10.1515/eng-2021-0053/asset/graphic/j_eng-2021-0053_fig_003.jpg)
MR damper based prosthetic device [21]
2 MR fluid damper model based on Extreme Learning Machine
Machine learning is an alternative method that is able to obtain a model due to the ease of adjusting the input and output variables. It can learn from data based on past input data, and effectively predict future performance [22]. Therefore, Extreme Learning Machine (ELM) is an algorithm that calculates single-hidden layer neural networks (SLFNs) to achieve the optimal generalization, without iterations [23]. Single-hidden layer feedforward neural network (SLFN) is a common architecture to perform ELM. It is consists of ith input (xi), weighting input (wj) on each ith input, activation function g (wj, bj, xi) in each hidden node, bias (bj) on the jth hidden node, weighting outputs (βj) and outputs Ok. The single-hidden layer neural network for the MR fluid damper model as described in Figure 1.
The derived mathematical form of the SLFNs can be seen in Equation (1), and can be simplified to Equation (2) [23].
where the H, and T can be defined as follows:
Various nonlinear piecewise continuous functions are available to be implemented in ELM. In this work, the following functions were considered:
Sigmoid function
(6)Hard limit function
(7)Sine function
(8)
The application of these nonlinear piecewise continuous functions are possible for almost all the hidden node functions. The number of hidden nodes for the SLNFs were randomly assigned, and the output weights of SLFNs were analytically determined in the ELM algorithm. To develop the MR fluid damper prediction model, the force and displacement were used as inputs, and the damping force was chosen as the targeted output respectively. Here, the model structure was considered in a single-hidden layer neural network (SLFN), as depicted in Figure 4. As in machine learning, a few terms for variables were considered as follows: (1) Inputs: The inputs (xi) like force variables and displacement variables which can be obtained from the experimental work; (2) Outputs: The outputs (Oi) represent the damping force prediction of the obtained ELM model after training; (3) Targets: The targets T are experimental data of the damping force for benchmarking the outputs from the ELM modelling prediction, and the error between prediction and measured data.
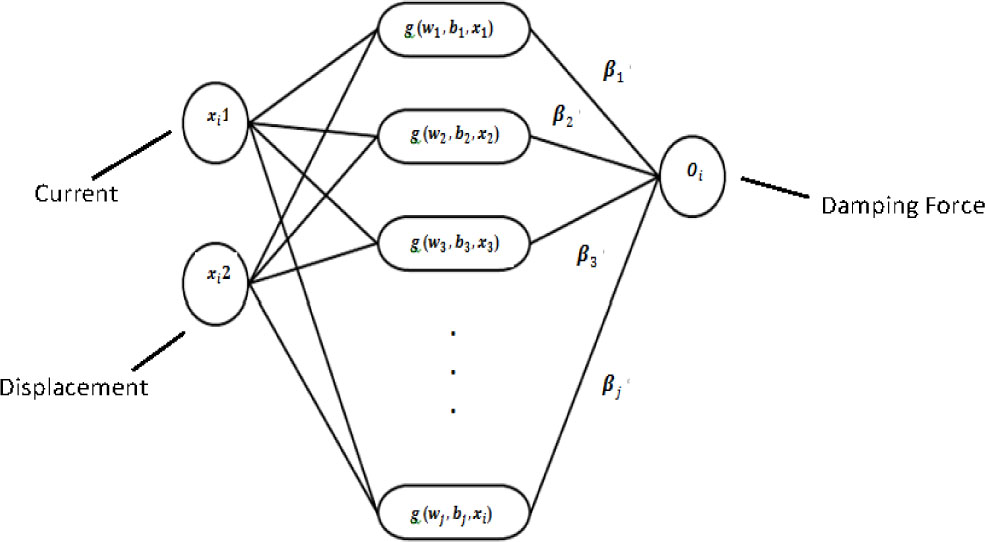
Single hidden layer feed-forward neural network of MR fluid damper
The flow of the modelling process is shown in Figure 5. It starts from the pre-processing phase, which involves training the model. In the training phase, reference data is required, which are inputs and outputs from the experimental work. In this process, all proposed activation functions vary by finding the optimal one, based on the highest accuracy obtained. Then, after the training phase, the model was developed. The model was visualized by the user as a prediction system to forecast the hysteresis loop of the MR fluid damper.

The proposed MR fluid damper hysteresis loop modelling process
2.1 Modeling data
The data contains about 5,000 measurement points, where the data were then separated into different applied currents, ranging from 0.1A to 0.4A. Five datasets representing five different applied currents were used. Each dataset contains 1000 data samples. This paper only considers on-state conditions to find the damping force in the presence of a magnetic field. Thus, the off-state condition is not discussed further. Table 1 shows the distribution of the experimental data which have been divided into learned and unlearned data for the purpose of training and testing the ELM algorithm respectively.
Distribution of training and testing data
| Experiment data | Value (A) |
|---|---|
| Learned current (Training) | 0.1 |
| 0.2 | |
| 0.3 | |
| 0.4 | |
| Unlearned current (Testing) | 0.35 |
2.2 Simulation setups
The experimental data were divided into two groups, which are training and testing respectively. These two groups play a significant role to evaluate the model, where the training data are used for determining the output weights in the ELM model. The trained data performance was then assessed for the simulation in order to calculate for the accuracy based on the outputs and targets of the testing data. Using ELM, the data can be determined into testing and training, where 80% of the data was used for training, while the remaining 20% were used for testing. On the other hand, the number of hidden nodes was selected intuitively on a trial and error basis, with the selected value being 100.
In this work, the input weights and bias were assigned using a normal distribution function. The setup values for all the parameters are shown in Table 2. The simulations were conducted using Matlab®, with a 64 bit (3.4GHz) CPU. The accuracy and regression fitness of the training and prediction performance were evaluated based on the RMSE and R2, as shown in Equations (9) and (10) respectively.
where τe,
Modeling parameters
| Model parameter | Setting/Values |
|---|---|
| Hidden nodes | 100 |
| Activation function | Hard limit, Sigmoid, Sine |
| Input weight and bias determination | Normal Distribution |
| Training data | 80% |
| Testing data | 20% |
3 Result and Discussion
3.1 Fitting error of Training data
In order to evaluate the prediction capability of the ELM algorithm in modeling the MR fluid damper, different activation function schemes were compared, including sine, hard limit and sigmoid, using the training data for current variations of 0.1A, 0.2A, 0.3A and 0.4A. The results for each activation function scheme is illustrated in Table 3. The comparison between the schemes plays a significant role in determining the best parameter setup, as this would affect the performance in predicting the hysteresis loop of the adopted MR fluid damper. Here, the optimal choice for the activation function associated with the ELM technique is a crucial to achieve the highest prediction accuracy possible.
Prediction accuracy of training data
| Activation function | Hidden nodes | Training time (s) | RMSE(N) | R2 |
|---|---|---|---|---|
| Sine | 100 | 0.734 | 1.99 | 0.999 |
| Hard limit | 100 | 0.375 | 3.99 | 0.991 |
| Sigmoid | 100 | 0.359 | 2.09 | 0.999 |
Based on Table 3, the training data with the sine function performed better on RMSE, with a slight difference of 1.99N, followed by the sigmoid function and hard limit function. In addition, the R2 for both sigmoid and sine functions were close to 1, showing that the correlation between input and predicted output is excellent. In addition, the training time for the sigmoid function was the least. Even though the training time for hard limit functions was lower than the sine function, the training accuracy for the hard limit was lower than the sine function. However, the prediction performance of the hard limit function shows acceptable error, where the R2 reached 99.1%. Besides this statistical analysis, the graphical representations are shown in Figure 6(a), 6(b) and 6(c) for sine, hard limit and sigmoid activation function respectively. The patterns of predicted damping force were approximately identical to measured damping force for sigmoid and sine models, compared to the hard limit model, for all the applied currents.
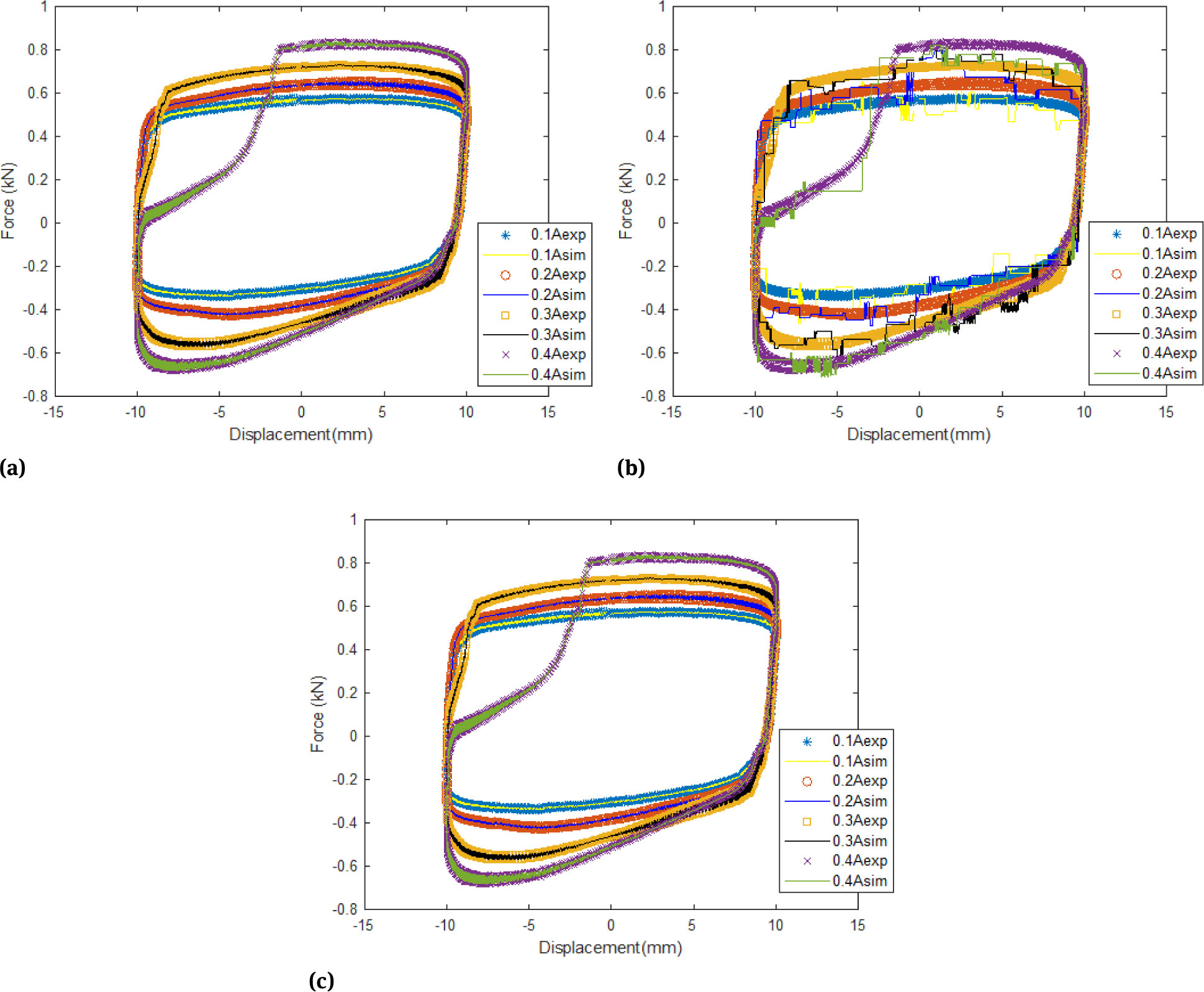
The hysteresis loop of MR fluid damper on three activation functions; (a) Sine function, (b) Hard limit function, (c) Sigmoid function

The process of proposed research
Generally, the sigmoid and sine function models were the best models in terms of training performance to replicate the MR fluid damper hysteresis loop on the force-displacement relationship. Nevertheless, one cannot generalize the model through only the training data. Thus, it is crucial to test the unlearned data (i.e. testing data) to validate the ELM algorithm performance.
3.2 Model Validation
In order to validate all three trained models, the unlearned current (i.e. 0.35A) which was not included in training phase was used. As depicted in Figure 8, the pattern of the sine and sigmoid models were identical to the experimental hysteresis loop, compared to the hard limit model. Table 4 describes the performance accuracy of the trained models on unlearned current, based on RMSE and R2. Based on Table 4, the sigmoid model shows the best performance by producing the least prediction error. Despite the ELM algorithm with the sine activation function showing superior accuracy during training phase, the prediction performance for the unlearned data was not as good as expected.

The comparison of testing data (i.e. unlearned data) of different activation function with experimental data
Comparison between training and testing performance of three activation functions
| Activation Function | Hidden Nodes | Training RMSET (N) | R2 | Prediction RMSEP (N) | R2 | RMSET – RMSEP |
|---|---|---|---|---|---|---|
| Hard Limit | 100 | 3.99 | 0.991 | 8.20 | 0.990 | 4.21 |
| Sine | 100 | 1.99 | 0.999 | 4.80 | 0.999 | 2.81 |
| Sigmoid | 100 | 2.09 | 0.999 | 3.90 | 0.999 | 1.81 |
Meanwhile, the accuracy performance of the hard limit function for the testing phase performed worse compared to the sine and sigmoid functions. This resulted in a large undesirable error with respect to the experimental data (i.e. benchmark), although the predicted data was within an acceptable range. Similar performance was produced by Bahiuddin et al. [2] in modeling the shear stress model of MR grease, where the sigmoid and sine transfer functions showed great performance, while the hard limit function showed the least performance. Generally, the proposed models with respect to all activation functions have shown good agreement in terms of predicting the hysteresis loop pattern. Thus, the ELM algorithm has the capability to model the MR fluid damper hysteresis loop, which is important in determining the force-displacement relationship.
3.3 Comparative study on ANN model
The performance of the proposed modelling method is compared to the ANN method in terms of training time and accuracy. To allow for a feasible comparison, both ELM and ANN methods were assigned with 100 hidden nodes. The training data used for both methods were 0.1A, 0.2A, 0,3A and 0.4A, while 0.35A was used for prediction as unlearned data. The results demonstrate that ELM has shown better performance in terms of training time and prediction of un-learned data. In fact, ANN training time is greater than ELM. As it is known that ANN takes a longer time to train, the greater the number of hidden nodes, the longer the training time. This is due to iteratively updating the weight and bias parameters. In addition, ANN may face overfitting phenomena, where high testing accuracy is achieved, despite the low training accuracy, when the hidden number is too large [24]. Furthermore, the back-propagation algorithm is commonly used as the learning algorithm in the ANN applied gradient descent method to update the weights. However, when the learning rule in gradient descent is too small, the learning algorithm converges slowly. When the learning rule is too large, the algorithm becomes unstable and diverges [25]. Thus, it is suggested that the ANN has small hidden nodes to reduce the consequences. Meanwhile, ELM produces higher accuracy with fast training time, with the same number of hidden nodes.
Comparison between ANN and ELM method
| Method | Hidden nodes | Training time (s) | Prediction RMSE (kN) | R2 |
|---|---|---|---|---|
| ANN | 100 | 16.22 | 288.8 | 0.956 |
| ELM | 100 | 0.38 | 8.20 | 0.990 |
4 Conclusion
This work introduced ELM as a new platform to model the MR fluid damper hysteresis loop. It is extremely faster than ANN, and involves no iteration process. In addition, it produced good accuracy. Furthermore, the ELM algorithm of the MR fluid damper hysteresis loop was described in mathematical form to gain better understanding, where three models have been introduced based on three different activation functions. Training data is needed to develop the model, as it involves a supervised learning method. Meanwhile, the testing data is used to find the generalization performance. Based on the findings, the ELM prediction model with sigmoid activation function was the best model to replicate the MR fluid damper hysteresis loop. Lastly, the proposed model can replicate well the complex behaviour of MR fluid damper hysteresis loop. To enhance the model of MR fluid damper hysteresis loop, additional input variables can be added such as velocity, so that the model may predict both force-displacement and force-velocity relationship to show the pre- and post-yield saturation levels of the device. Besides that, in terms of modelling performance, other appropriate activation functions can be considered to model the MR fluid damper hysteresis loop such as radial basis function, ReLU and triangular basis function. To conclude, the findings of this work are beneficial for the engineering field, and expedite the development process of related models in the literature.
Acknowledgement
This work is funded by Universiti Teknologi Malaysia (UTM) Trans-Diciplinary Grant, UTM–TDR (07G19).
References
[1] F. Li, C. Tao, Research on magneto-rheological technology and its application, in: 2011 Chinese Control Decis. Conf., 2011: pp. 4072–4076. https://doi.org/10.1109/CCDC.2011.5968936.10.1109/CCDC.2011.5968936Search in Google Scholar
[2] I. Bahiuddin, S.A. Mazlan, M.I. Shapiai, S.B. Choi, F. Imaduddin, M.A.A. Rahman, M.H.M. Ariff, A new constitutive model of a magneto-rheological fluid actuator using an extreme learning machine method, Sensors Actuators, A Phys. 281 (2018) 209–221. https://doi.org/10.1016/j.sna.2018.09.010.10.1016/j.sna.2018.09.010Search in Google Scholar
[3] H.M. Bajaj, G.S. Birdi, B.A. Ugale, APPLICATION OF MAGNETO RHEOLOGICAL (MR) FLUID DAMPER AND ITS SOCIAL IMPACT, Int. J. Mech. Prod. Eng. 2 (2014) 41–44.Search in Google Scholar
[4] S.K. Sharma, J. Lee, Design and Development of Smart Semi Active Suspension for Nonlinear Rail Vehicle Vibration Reduction, Int. J. Struct. Stab. Dyn. 20 (2020) 2050120. https://doi.org/10.1142/S0219455420501205.10.1142/S0219455420501205Search in Google Scholar
[5] W. Wang, X. Hua, X. Wang, J. Wu, H. Sun, G. Song, Mechanical behavior of magnetorheological dampers after long-term operation in a cable vibration control system, Struct. Control Heal. Monit. 26 (2019) e2280. https://doi.org/10.1002/stc.2280.10.1002/stc.2280Search in Google Scholar
[6] D.H. Wang, W.H. Liao, Modeling and control of magnetorheological fluid dampers using neural networks, Smart Mater. Struct. 14 (2005) 111–126. https://doi.org/10.1088/0964-1726/14/1/011.10.1088/0964-1726/14/1/011Search in Google Scholar
[7] F. Imaduddin, S.A. Mazlan, Ubaidillah, M.H. Idris, I. Bahiuddin, Characterization and modeling of a new magnetorheological damper with meandering type valve using neuro-fuzzy, J. King Saud Univ. – Sci. 29 (2017) 468–477. https://doi.org/10.1016/j.jksus.2017.08.012.10.1016/j.jksus.2017.08.012Search in Google Scholar
[8] L. Gui, W. Shi, W. Liu, A semi-active suspension design for off-road vehicle base on Magneto-rheological technology, in: 2012 9th Int. Conf. Fuzzy Syst. Knowl. Discov., 2012: pp. 2565–2568. https://doi.org/10.1109/FSKD.2012.6234078.10.1109/FSKD.2012.6234078Search in Google Scholar
[9] E. Chen, C. Si, J. Liu, Experimental study of Magneto-Rheological materials and its damper dynamic characteristics, in: 2010 Sixth Int. Conf. Nat. Comput., 2010: pp. 278–281. https://doi.org/10.1109/ICNC.2010.5583825.10.1109/ICNC.2010.5583825Search in Google Scholar
[10] M. Askari, J. Li, B. Samali, X. Gu, Experimental forward and inverse modelling of magnetorheological dampers using an optimal Takagi–Sugeno–Kang fuzzy scheme, J. Intell. Mater. Syst. Struct. 27 (2016) 904–914. https://doi.org/10.1177/1045389X15604403.10.1177/1045389X15604403Search in Google Scholar
[11] B. Ma, F. Yang, D. Gong, Z. Wei, LuGre model for a magneto-rheological (MR) fluid damper, in: 2017 Int. Conf. Adv. Mechatron. Syst., 2017: pp. 1–4. https://doi.org/10.1109/ICAMechS.2017.8316476.10.1109/ICAMechS.2017.8316476Search in Google Scholar
[12] X. Xu, Y. Peng, X. Du, M. Yu, J. Fu, Modeling of magnetorheological damper using ANFIS, in: 2017 29th Chinese Control Decis. Conf., 2017: pp. 2133–2138. https://doi.org/10.1109/CCDC.2017.7978868.10.1109/CCDC.2017.7978868Search in Google Scholar
[13] I. Bahiuddin, S.A. Mazlan, M.I. Shapiai, N.A. Nordin, F. Imaduddin, Ubaidillah, N.A. Nordin, D. Adiputra, Field dependent-shear stress prediction of magnetorheological fluid using an optimum extreme learning machine model, J. Adv. Res. Fluid Mech. Therm. Sci. 70 (2020) 89–96. https://doi.org/10.37934/ARFMTS.70.2.8996.10.37934/arfmts.70.2.8996Search in Google Scholar
[14] I. Bahiuddin, S.A. Mazlan, M.I. Shapiai, N. Mohamad, F. Imaduddin, A Model of Magnetorheological Grease using Machine Learning Method, Key Eng. Mater. 775 (2018) 191–197. https://doi.org/10.4028/www.scientific.net/KEM.775.191.10.4028/www.scientific.net/KEM.775.191Search in Google Scholar
[15] S.M. Ibn Shamsah, T.O. Owolabi, Empirical method for modeling crystal lattice parameters of A2XY6 cubic crystals using grid search-based extreme learning machine, J. Appl. Phys. 128 (2020) 185106. https://doi.org/10.1063/5.0024595.10.1063/5.0024595Search in Google Scholar
[16] M.A. Mujtaba, H.H. Masjuki, M.A. Kalam, H.C. Ong, M. Gul, M. Farooq, M.E.M. Soudagar, W. Ahmed, M.H. Harith, M.N.A.M. Yusoff, Ultrasound-assisted process optimization and tribological characteristics of biodiesel from palm-sesame oil via response surface methodology and extreme learning machine - Cuckoo search, Renew. Energy. 158 (2020) 202–214. https://doi.org/10.1016/j.renene.2020.05.158.10.1016/j.renene.2020.05.158Search in Google Scholar
[17] H. Liu, S. Yin, C. Chen, Z. Duan, Data multi-scale decomposition strategies for air pollution forecasting: A comprehensive review, J. Clean. Prod. 277 (2020) 124023. https://doi.org/10.1016/j.jclepro.2020.124023.10.1016/j.jclepro.2020.124023Search in Google Scholar
[18] S. Chen, C. Gu, C. Lin, Y. Wang, M.A. Hariri-Ardebili, Prediction, monitoring, and interpretation of dam leakage flow via adaptative kernel extreme learning machine, Measurement. 166 (2020) 108161. https://doi.org/10.1016/j.measurement.2020.108161.10.1016/j.measurement.2020.108161Search in Google Scholar
[19] E. Hazir, T. Ozcan, K.H. Koç, Prediction of Adhesion Strength Using Extreme Learning Machine and Support Vector Regression Optimized with Genetic Algorithm, Arab. J. Sci. Eng. 45 (2020) 6985–7004. https://doi.org/10.1007/s13369-020-04625-0.10.1007/s13369-020-04625-0Search in Google Scholar
[20] T.H. Nguyen, C.-K. Lin, P.-C. Tung, C. Nguyen-Van, J.-R. Ho, An extreme learning machine for predicting kerf waviness and heat affected zone in pulsed laser cutting of thin non-oriented silicon steel, Opt. Lasers Eng. 134 (2020) 106244. https://doi.org/10.1016/j.optlaseng.2020.106244.10.1016/j.optlaseng.2020.106244Search in Google Scholar
[21] S. Pandit, A.K. Godiyal, A.K. Vimal, U. Singh, D. Joshi, D. Kalyanasundaram, An Affordable Insole-Sensor-Based Trans-Femoral Prosthesis for Normal Gait, Sensors. 18 (2018) 706. https://doi.org/10.3390/s18030706.10.3390/s18030706Search in Google Scholar PubMed PubMed Central
[22] I. Bahiuddin, S.A. Mazlan, I. Shapiai, F. Imaduddin, Ubaidillah, S.B. Choi, Constitutive models of magnetorheological fluids having temperature-dependent prediction parameter, Smart Mater. Struct. 27 (2018) 95001. https://doi.org/10.1088/1361-665X/aac237.10.1088/1361-665X/aac237Search in Google Scholar
[23] I. Bahiuddin, S.A. Mazlan, M.I. Shapiai, F. Imaduddin, Ubaidillah, Study of extreme learning machine activation functions for magnetorheological fluid modelling in medical devices application, in: 2017 Int. Conf. Robot. Autom. Sci., 2017: pp. 1–5. https://doi.org/10.1109/ICORAS.2017.8308053.10.1109/ICORAS.2017.8308053Search in Google Scholar
[24] I. Bahiuddin, F. Imaduddin, S.A. Mazlan, M.H.M. Ariff, K.B. Mohmad, Ubaidillah, S. Choi, Accurate and fast estimation for field-dependent nonlinear damping force of meandering valve-based magnetorheological damper using extreme learning machine method, Sensors Actuators A Phys. 318 (2021) 112479. https://doi.org/10.1016/j.sna.2020.112479.10.1016/j.sna.2020.112479Search in Google Scholar
[25] G.-B. Huang, Q.-Y. Zhu, C.-K. Siew, Extreme learning machine: Theory and applications, Neurocomputing. 70 (2006) 489–501. https://doi.org/10.1016/j.neucom.2005.12.126.10.1016/j.neucom.2005.12.126Search in Google Scholar
© 2021 K. D. Saharuddin et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.