Mars Science Laboratory
Mars Science Laboratory, MSL (oficjalna nazwa łazika: Curiosity[1]) – bezzałogowa misja kosmiczna, której celem jest zbadanie przeszłego i obecnego środowiska Marsa poprzez szereg badań, wykonanych za pomocą łazika Curiosity, wewnątrz krateru Gale. Misja rozpoczęła się 26 listopada 2011 roku wystrzeleniem sondy kosmicznej przy użyciu rakiety Atlas V (konfiguracja 541) z Cape Canaveral Air Force Station. Lądowanie na Marsie nastąpiło 6 sierpnia 2012. Główna misja łazika zaplanowana jest na 1 rok marsjański (tj. 687 ziemskich dni), z możliwością jej przedłużenia.

| |
| Inne nazwy |
MSL |
|---|---|
| Zaangażowani | |
| Indeks COSPAR |
2011-070A |
| Rakieta nośna | |
| Miejsce startu | |
| Cel misji | |
| Orbita (docelowa, początkowa) | |
| Czas trwania | |
| Początek misji |
26 listopada 2011 (15:02 UTC) |
| Data lądowania |
6 sierpnia 2012 (05:17:57 UTC) |
| Wymiary | |
| Wymiary |
4,5 m średnicy, 3 m wys. łazik Curiosity: 3,0 m dług., 2,8 m szer., 2,1 m wys. |
| Masa całkowita |
3893 kg łazik Curiosity: 899 kg |
| Masa aparatury naukowej |
75 kg |
Opis ogólny
edytujBadania wykonywane w trakcie misji są częścią eksperymentu, którego celem jest szersze poznanie przeszłych i obecnych procesów przebiegających w atmosferze i na powierzchni Marsa. Pojazd wyposażony jest w dziesięć instrumentów naukowych. Aparaturę można podzielić na:
- zamontowany na maszcie osprzęt do badania otoczenia i wyszukiwania celów do pobrania próbek,
- instrumenty na ramieniu robotycznym do badań przy bezpośrednim zbliżeniu do celu,
- urządzenia wewnętrzne do analizy próbek i monitorowania środowiska wokół łazika.
Cele naukowe misji
edytuj
Eksperymenty wykonywane na powierzchni są skupione wokół następujących celów:
- ocena możliwości występowania potencjalnych warunków do życia w przeszłości,
- badanie możliwości utrzymania się życia organicznego na Marsie,
- wykonanie pomiarów meteorologicznych,
- poszukiwanie pierwiastków biogennych,
- badanie stopnia wilgotności gleby oraz poszukiwanie wody i związków mineralnych z nią związanych,
- pomiary widma wysokoenergetycznego promieniowania naturalnego,
- badanie składu skał i gleby,
- charakterystyka możliwych cyklów hydrologicznych.
Rakieta nośna
edytujMSL został wyniesiony przez dwustopniową rakietę Atlas V-541 dostarczoną przez firmę United Launch Alliance. Konfiguracja charakteryzuje się owiewką o średnicy 5 metrów, czterema rakietami pomocniczymi i jednym silnikiem w drugim stopniu. Dolny stopień jest napędzany dwuskładnikowym paliwem złożonym z kerozyny RP-1 (substancja palna) i ciekłego tlenu (utleniacz). Silnik drugiego stopnia jest zasilany ciekłym wodorem (paliwo) i ciekłym tlenem (utleniacz).
Przebieg misji
edytuj_spacecraft_launches.jpg)
.png)
Start
edytujStart sondy MSL nastąpił 26 listopada 2011 roku o godz. 15:02 UTC ze stanowiska startowego SLC-41 na Cape Canaveral Air Force Station[2]. Sonda została wyniesiona przez rakietę nośną Atlas V 541. Po odpaleniu pierwszego członu rakiety zostały uruchomione cztery rakiety pomocnicze na paliwo stałe. Po ich wypaleniu (po 90 sekundach) zostały planowo odrzucone. 4,5 min od startu nastąpiło wyłączenie silnika pierwszego członu i separacja członu Centaur. Ten po 10 sekundach od wyłączenia silnika pierwszego stopnia został odpalony i o 15:13 UTC ustawił ładunek na tymczasowej orbicie parkingowej o parametrach 165 km × 324 km × 35,5°. O 15:34 UTC nastąpiło ponowne odpalenie członu Centaur w celu wprowadzenia sondy na trajektorię w kierunku Marsa. Silnik działał do 15:42 UTC i po jego wyłączeniu nastąpiła o 15:46 UTC separacja MSL od nosiciela, a stopień Centaur wykonał tzw. manewr mijania polegający na usunięciu rakiety z potencjalnej trajektorii lotu sondy[3]. Sonda znalazła się na orbicie heliocentrycznej o peryhelium 0,98 j.a., aphelium 1,53 j.a. i nachyleniu względem ekliptyki 1,7°[4].
Przelot międzyplanetarny
edytujTa faza lotu trwała 210 dni. Podstawowe czynności wykonane podczas tej fazy to kontrole działania systemów pokładowych i instrumentów naukowych. Wykonano trzy manewry korekcyjne (15, 120 i 180 dni po starcie). Sonda leciała trajektorią typu 1, co oznacza, że została pokonana mniej niż połowa drogi wokół Słońca między jedną a drugą planetą.
Faza zbliżeniowa
edytujKolejna faza trwała 45 dni. W jej trakcie nastąpił jeden dodatkowy manewr korekcyjny. Tuż przed wejściem w atmosferę Marsa miały miejsce przygotowania do tej fazy (m.in. uruchomienie specjalnych przyrządów pomiarowych i podgrzewanie układów wrażliwych na zmiany temperatury).
Faza wejścia i lądowanie
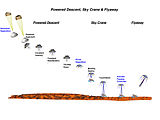
edytujGdy statek przekroczył granicę atmosfery Marsa, rozpoczęła się ostatnia faza lotu – wejście i lądowanie (EDL – ang. Entry, Descent and Landing). Cała faza, choć najkrótsza (trwała kilkanaście minut), była krytyczna dla powodzenia całej misji. Na 10 minut przed wejściem do atmosfery statek odłączył się od modułu przelotowego (który wykonywał korekty trajektorii do Marsa). MSL wszedł w atmosferę na wysokości ok. 130 km nad powierzchnią. Po odłączeniu uruchomiły się przewidziane na tę fazę instrumenty pomiarowe. Następnie silniczki kapsuły ustawiły statek w stałym położeniu umożliwiającym bezpieczne wejście w atmosferę. Potem zostały odrzucone ciężary stabilizujące obrót statku. Trajektoria wejścia była cały czas utrzymywana przez silniki manewrowe. Kolejnym etapem podejścia było otwarcie spadochronu, które nastąpiło na wysokości 11 km, gdy statek spadał z prędkością 400 m/s. Tuż po ich otwarciu odrzucona została osłona termiczna umieszczona na spodzie kapsuły. Zaraz po tym zostały uruchomione urządzenia radarowe i termiczne kontrolujące wysokość statku. Następnie dolna część kapsuły (tj. lądownik) odłączyła się od modułu atmosferycznego ze spadochronem, po czym zostały uruchomione silniki lądujące lądownika, które od wysokości 1 km stopniowo redukowały prędkość i pozwalały na bezpieczne zniżanie. W trakcie zniżania na żurawiu (Sky Crane) został opuszczony pojazd. Gdy dotknął gruntu (z prędkością 61 cm/s[5]), kapsuła z żurawiem odłączyła się od łazika i odleciała na bezpieczną odległość. Po przyziemieniu komputer pokładowy przełączył się z trybu podejścia do lądowania (EDL mode) na tryb powierzchniowy (surface mode) i łazik przesłał na Ziemię (poprzez sondę Mars Odyssey) pierwsze zdjęcia.
-
 Lądowanie łazika MSL – faza wejścia w atmosferę
Lądowanie łazika MSL – faza wejścia w atmosferę -
 Lądowanie łazika MSL – ostatnia faza z przyziemieniem
Lądowanie łazika MSL – ostatnia faza z przyziemieniem -
 Wejście lądownika w atmosferę
Wejście lądownika w atmosferę -
 Lądowanie Curiosity. Widoczny jest żuraw (sky crane) opuszczający łazik
Lądowanie Curiosity. Widoczny jest żuraw (sky crane) opuszczający łazik




Budowa statku
edytuj
1 – moduł przelotowy
2 – osłona tylna
3 – lądownik
4 – łazik
5 – osłona termiczna
6 – spadochron
Na konstrukcję sondy Mars Science Laboratory składają się cztery podstawowe moduły: łazik, lądownik, kapsuła i moduł przelotowy. Każdy z tych modułów odpowiada za inną fazę lotu i ma pełnić ściśle określone funkcje.
Moduł przelotowy (Cruise stage)
edytujGłównym zadaniem modułu był transport statku na trajektorii do Marsa, który został osiągnięty za pomocą odpaleń silników korekcyjnych systemu napędowego. Sam moduł zapewniał ponadto energię elektryczną podczas rejsu i służył do komunikacji z sondą. Moduł podczas startu był połączony łącznikiem pierścieniowym ze stopniem Centaur. Z drugiej strony był przymocowany do kapsuły, w której był umieszczony łazik. Moduł przelotowy został odrzucony tuż przed wejściem w atmosferę Marsa.
Moduł zbudowany był w większości z aluminium i miał kształt płaskiego walca. Wyposażony był w radiator i ułożone pierścieniowo baterie słoneczne. System napędowy tworzyło osiem silników korekcyjnych zasilanych hydrazyną. Stopień był stabilizowany obrotowo. Nawigacja statku obejmowała czujnik światła słonecznego, szukacz gwiazd i system kontroli bezwładnościowej. Cały system nawigacyjny był połączony z łazikiem, który miał przetwarzać i wysyłać informacje z sondy. Kolejnym zadaniem modułu była kontrola temperatury przy pomocy termostatów zamontowanych wewnątrz korpusu przelotowego i radiatora głównego wraz z radiatorami pomocniczymi na zewnątrz obudowy. Do łączności z Ziemią służyła antena średniego zysku działająca w paśmie X.
Kapsuła (Aeroshell)
edytujKapsuła stanowiła osłonę aerodynamiczną sondy. Jej główną funkcją była ochrona termiczna podczas wejścia w atmosferę. Dodatkowo kapsuła została wyposażona w spadochron, który wyhamował statek przed ostatnią fazą lądowania. Całość można podzielić na dolną osłonę termiczną i osłonę górną ze spadochronem. Osłona górna zawierała łącznik z modułem rejsowym i układy elektroniczne. Osłona termiczna oprócz funkcji ochronnej zebrała dane o atmosferze marsjańskiej. Kapsuła była też wyposażona w osiem silników, które utrzymywały wymagany kąt natarcia. W osłonach umieszczono ponadto balasty, które po odrzuceniu zmieniły środek ciężkości całego kompleksu. Stopień ten był także wyposażony w anteny komunikacyjne. Całość zbudowana została z płyt aluminiowych pokrytych kompozytem grafitowo-epoksydowym. Osłona termiczna była pokryta ablatorem z włókien węglowych impregnowanym fenolem (PICA).
Lądownik (Descent stage)
edytujGłównym zadaniem modułu lądującego (zwanego Sky Crane, ang. Podniebny Dźwig) było wyhamowanie statku silnikami w ostatnich minutach lotu i postawienie łazika za pomocą żurawia na powierzchni planety. Cel ten został osiągnięty dzięki ośmiu silnikom rozmieszczonym w parach na module lądującym. Gdy silniki ustaliły stały poziom zniżania, trzy wyciągane liny, do których przyczepiony był pojazd, zaczęły go stopniowo obniżać aż do miękkiego przyziemienia.
Curiosity Rover
edytuj
.jpg)
Curiosity jest lądownikiem sondy - zautomatyzowanym laboratorium naukowo-badawczym. Zawiera instrumenty naukowe do zaplanowanych zadań. Jest to sześciokołowy pojazd z zamontowanym oprzyrządowaniem badawczym, ramieniem robotycznym, systemami nawigacyjnymi i komunikacyjnymi, awioniką, oprogramowaniem i autonomicznym źródłem zasilania – radioizotopowym generatorem termoelektrycznym.
Wyposażenie
edytuj- MastCam − dwie dwu mega pikselowe kolorowe kamery wideo umieszczone po lewej (z obiektywem 34 mm) i po prawej stronie masztu (z obiektywem 100 mm) .
- ChemCam – urządzenie do zdalnej detekcji składu chemicznego, wykorzystujące laser i kamerę z lunetą do wykonywania zdjęć makro z odległości do 7,2 metra.
- Mars Hand Lens Imager (MAHLI) – kamera, jako jedno z pięciu instrumentów, umieszczona na rewolwerowej wieżyczce łazika Curiosity.
- APXS – spektrometr do badania składu chemicznego skał i gruntu.
- CheMin – instrument do analiz mineralogicznych metodą dyfrakcji i fluorescencji rentgenowskiej.
- Radiation Assessment Detector (RAD) – detektor szerokiego zakresu radiacji na powierzchni planety (do ustalenia zagrożeń przyszłej wyprawy załogowej).
- Mars Descent Imager (MARDI) – kamera do fotografowania i filmowania z wysoką rozdzielczością w fazie opadania i lądowania.
- Sample Analysis at Mars (SAM) – zintegrowany zespół przyrządów zawierający chromatograf gazowy, spektrometr mas i laserowy do analiz minerałów i atmosfery.
- Dynamic of Albedo Neutrons (DAN) – pulsujące źródło neutronów i detektor wody lub lodu na powierzchni Marsa.
- Rover Environmental Monitoring Station (REMS) – stacja meteorologiczna.
Zespół i koszty misji
edytujMisja MSL jest prowadzona dla NASA przez Jet Propulsion Laboratory w Pasadenie. Kierownikiem misji (Project Manager) jest Peter C. Theisinger z JPL. Głównym naukowcem projektu (Project Scientist) jest dr John Grotzinger z California Institute of Technology w Pasadenie.
Łazik został zaprojektowany i skonstruowany w Jet Propulsion Laboratory.
Całkowity koszt misji, w tym koszty startu, ma wynieść 2,5 mld USD[6].
Przypisy
edytuj- ↑ NASA wybrała nazwę dla MSL (ang.)
- ↑ NASA – NASA Launches Most Capable and Robust Rover to Mars
- ↑ Justin Ray: Atlas Launch Report. Mission Status Center. Spaceflight Now, 2011-11-26. [dostęp 2011-12-26]. (ang.).
- ↑ Jonathan McDowell: Jonathan's Space Report No. 651. 2011-12-20. [dostęp 2011-12-26]. [zarchiwizowane z tego adresu (2012-11-12)]. (ang.).
- ↑ Curiosity Cam. 2012-08-06. [dostęp 2012-08-06]. (ang.).
- ↑ NASA: Mars Science Laboratory Launch Press Kit. 2011. [dostęp 2011-11-25]. (ang.).
Linki zewnętrzne
edytuj- Oficjalna strona misji prowadzona przez NASA (ang.)
- Oficjalna strona misji prowadzona przez Jet Propulsion Laboratory (ang.)
- Informacje dla prasy przygotowane przez Jet Propulsion Laboratory (ang.)
- Kompendium wiedzy o łaziku MSL. astronautyka.org. [zarchiwizowane z tego adresu (2012-10-15)]. przygotowane przez Polskie Forum Astronautyczne
- blog poświęcony misji marsjańskiego łazika
- Mast Camera, czyli czym fotografuje się na Marsie