
Mapové zobrazení: Porovnání verzí
→Kartografické zkreslení: preklep, druhy pokus |
m editace uživatele 176.29.120.208 (diskuse) vráceny do předchozího stavu, jehož autorem je PetrVod značka: rychlé vrácení zpět |
||
| (Není zobrazeno 17 mezilehlých verzí od 13 dalších uživatelů.) | |||
| Řádek 1: | Řádek 1: | ||
'''Mapové zobrazení''', často též '''kartografická projekce''', je způsob, jakým se převádí zobrazení povrchu [[Země]] (či jiného nebeského tělesa) z trojrozměrného zakřiveného povrchu referenčního [[elipsoid]]u či [[koule]] do [[rovina|roviny]]. Výsledek takového [[Geometrie|geometrického]] či početního postupu nazýváme [[mapa]]. Nejčastěji bývá na mapě sever směrem nahoru, jih směrem dolů, východ směrem doprava a západ směrem doleva. |
'''Mapové zobrazení''', často též '''kartografická projekce''', je způsob, jakým se převádí zobrazení povrchu [[Země]] (či jiného nebeského tělesa) z trojrozměrného zakřiveného povrchu referenčního [[elipsoid]]u či [[koule]] do [[rovina|roviny]]. Výsledek takového [[Geometrie|geometrického]] či početního postupu nazýváme [[mapa]]. Nejčastěji bývá na mapě sever směrem nahoru, jih směrem dolů, východ směrem doprava a západ směrem doleva. |
||
Mezi základní parametry kartografického zobrazení patří:<ref name=":0">{{Citace monografie |
|||
Nejpoužívanější mapou na [[Spojené státy americké|amerických]] školách je [[Mercatorovo zobrazení]], to je však kritizované za zvětšení oblastí dále od rovníku. [[Gallovo-Petersovo zobrazení]] ukazuje správné velikosti území, tvary a úhly jsou však špatně. Instituce [[National Geographic Society]] dříve používala [[Robinsonovo zobrazení]], v roce 1998 však bylo nahrazeno [[Winkelovo zobrazení]]m, které minimalizuje tři typy zkreslení: oblasti, směr a vzdálenost.<ref>{{Citace elektronického periodika | titul = Which is the best map projection? | periodikum = Geoawesomeness | datum_vydání = 2017-04-25 | url = https://geoawesomeness.com/best-map-projection/}}</ref> |
|||
| příjmení = Lambert |
|||
| jméno = Nicolas |
|||
| příjmení2 = Zanin |
|||
| jméno2 = Christine |
|||
| titul = Practical Handbook of Thematic Cartography |
|||
| url = http://dx.doi.org/10.1201/9780429291968 |
|||
| vydání = 1 |
|||
| vydavatel = CRC PRESS |
|||
| rok vydání = 2020 |
|||
| počet stran = 211 |
|||
| strany = 19–27 |
|||
| isbn = 978-0-367-26129-0 |
|||
| isbn2 = 978-0-429-29196-8 |
|||
| doi = 10.1201/9780429291968 |
|||
| oclc = 1354513003 |
|||
| jazyk = en |
|||
}}</ref> |
|||
* typ zobrazovací plochy, |
|||
* poloha osy zobrazovací plochy, |
|||
* a poloha středu promítání. |
|||
== Kartografické zkreslení == |
== Kartografické zkreslení == |
||
Protože povrch koule či elipsoidu není rozvinutelný do roviny (stejně jako nelze do roviny bez deformace rozvinout oloupanou slupku pomeranče), je zapotřebí převést jej na povrch některého geometrického objektu, jehož povrch do roviny rozvinutelný je. Takovými objekty jsou [[válec]], [[kužel]] a |
Protože povrch koule či elipsoidu není rozvinutelný do roviny (stejně jako nelze do roviny bez deformace rozvinout oloupanou slupku pomeranče), je zapotřebí převést jej na povrch některého geometrického objektu, jehož povrch do roviny rozvinutelný je. Takovými objekty jsou [[válec]], [[kužel]] a také rovinná plocha sama. Převod kulové plochy do roviny znamená vždy tvarové zkreslení části obsažených informací. Ve výsledném rovinném zobrazení nemohou být současně zachovány všechny hlavní údaje – délky, úhly a plochy – vždy dochází ke zkreslení některého z nich (případně všech). Proto byla postupem času vyvinuta řada mapových zobrazení, z nichž každé klade důraz na jiný z důležitých údajů. Při vytváření map malých území (do několika set km²{{Fakt/dne|20210226212456|}}) je zkreslení téměř zanedbatelné, je-li však třeba zachytit na mapě větší oblast (kraj, stát, světadíl, oceán či celou Zemi), je nutné pečlivě volit mapové zobrazení tak, aby odpovídalo účelu mapy. |
||
<gallery caption="Ukázka kartografického zkreslení"> |
<gallery caption="Ukázka kartografického zkreslení"> |
||
Soubor:Tissot world from space.png|[[Tissotova indikatrix|Tissotovy indikatrix]] rozmístěné pravidelně na povrchu Země. |
|||
Soubor:Tissot mercator.png|Ukázka zkreslení délek a ploch v oblasti [[Zeměpisný pól|pólů]] u [[Mercatorovo zobrazení|Mercatorova zobrazení]]. |
|||
Soubor:Tissot robinson.png|Ukázka zkreslení tvarů u [[Robinsonovo zobrazení|Robinsonova zobrazení]]. |
|||
</gallery> |
</gallery> |
||
Nejznámější je [[Mercatorovo zobrazení|Mercatorovo mapové zobrazení]],<ref>{{Citace monografie | příjmení1 = Snyder | jméno1 = John Parr | titul = Flattening the earth : two thousand years of map projections | vydavatel = University of Chicago Press | rok = 1997 | isbn = 0226767477}}</ref> to je však kritizované za („kolonialistické“) zvětšení oblastí dále od rovníku.<ref>https://www.businessinsider.com.au/boston-school-gall-peters-map-also-wrong-mercator-2017-3 {{Wayback|url=https://www.businessinsider.com.au/boston-school-gall-peters-map-also-wrong-mercator-2017-3 |date=20210818070914 }} - Some US schools have introduced a new world map — but it’s just as wrong as the one you’re familiar with</ref> [[Gall-Petersovo zobrazení]] ukazuje správné velikosti území, tvary a úhly ale neodpovídají skutečnosti. [[Kavrajského zobrazení]] bylo nejpoužívanější mapou v SSSR. Instituce [[National Geographic Society]] přešla roku 1988 na [[Robinsonovo zobrazení]] a v roce 1998 ho znovu nahradilo [[Winkelovo zobrazení|Winkelovým zobrazením]], které minimalizuje všechny tři typy zkreslení: plochy, úhly i délky.<ref>{{Citace elektronického periodika |
|||
| příjmení = Singh |
|||
| jméno = Ishveena |
|||
| titul = Which is the best map projection? |
|||
| periodikum = Geoawesomeness |
|||
| url = https://geoawesomeness.com/best-map-projection/ |
|||
| jazyk = en |
|||
| datum přístupu = 2021-02-25 |
|||
| datum_vydání = 2017-04-25 |
|||
}}</ref> Richard Čapek z [[Přírodovědecká fakulta Univerzity Karlovy|Přírodovědecké fakulty UK]] katedry kartografie a geoinformatiky a člen České geografické společnosti vytvořil žebříček nejlepších mapových zobrazení, z nejznámějších se umístilo: na čtvrtém místě Robinsonovo, na šestém Kavrajského a na devátém Winkelovo.<ref>{{Citace sborníku | příjmení1 = Čapek | jméno1 = Richard | titul = Which is the best projection for the world map | sborník = Proceedings of the 20th international Cartographic Conference | rok vydání = 2001 | url = https://icaci.org/files/documents/ICC_proceedings/ICC2001/icc2001/file/f24014.pdf | jazyk = en}}</ref> |
|||
== Populární mapová zobrazení == |
|||
== Nejznámější projekce == |
|||
<gallery> |
<gallery perrow=4> |
||
Soubor:Mercator projection Square.JPG|[[Mercatorovo zobrazení]] (1569) |
|||
Soubor:Mollweide projection SW.jpg|[[Mollweidovo zobrazení]] (1805) |
|||
Soubor:Winkel triple projection SW.jpg|[[Winkelovo zobrazení]] (Winkel III, 1921) |
|||
Soubor:Goode homolosine projection SW.jpg|[[Goodeho zobrazení]] (1923) |
|||
Soubor:Kavraiskiy VII projection SW.jpg|[[Kavrajského zobrazení]] (Kavrayskij VII, 1939) |
|||
Soubor:Dymaxion projection.png|[[Zobrazení Dymaxion]] (1954) |
|||
Soubor:Robinson projection SW.jpg|[[Robinsonovo zobrazení]] (1963) |
|||
Soubor:Gall–Peters projection SW.jpg|[[Gall-Petersovo zobrazení]] (1973) |
|||
</gallery> |
</gallery> |
||
== Třídění mapových zobrazení == |
== Třídění mapových zobrazení == |
||
[[ |
[[Soubor:Netzentwuerfe.png|náhled|Různá mapová zobrazení]] |
||
=== Mapová zobrazení podle kartografického zkreslení === |
=== Mapová zobrazení podle kartografického zkreslení === |
||
* '''ekvidistantní''' (délkojevná, stejnodélková) – nezkreslují vzdálenosti v určitém směru (netýká se všech délek) |
* '''ekvidistantní''' (délkojevná, stejnodélková) – nezkreslují vzdálenosti v určitém směru (netýká se všech délek) |
||
| Řádek 31: | Řádek 65: | ||
=== Mapová zobrazení podle vzhledu zobrazovací plochy === |
=== Mapová zobrazení podle vzhledu zobrazovací plochy === |
||
*'''jednoduchá''' |
* '''jednoduchá''' |
||
**'''azimutální''' – zobrazuje se přímo na rovinu (např. [[Gnómonická projekce]]) |
** '''[[Azimutální kartografické zobrazení|azimutální]]''' – zobrazuje se přímo na rovinu (např. [[Gnómonická projekce]]) |
||
**'''[[Kuželové zobrazení|kuželová]]''' – zobrazuje se na plášť kužele, který se poté rozvine do roviny |
** '''[[Kuželové zobrazení|kuželová]]''' – zobrazuje se na plášť kužele, který se poté rozvine do roviny |
||
**'''válcová''' – zobrazuje se na plášť válce, který se poté rozvine do roviny (např. [[Behrmannovo zobrazení|Behrmannovo]] nebo [[Mercatorovo zobrazení]]) |
** '''[[Válcové kartografické zobrazení|válcová]]''' – zobrazuje se na plášť válce, který se poté rozvine do roviny (např. [[Behrmannovo zobrazení|Behrmannovo]] nebo [[Mercatorovo zobrazení]]) |
||
*'''nepravá''' (pseudo-zobrazení) – odvozená z výše uvedených zobrazení azimutálních, kuželových a válcových (např. [[Mollweidovo zobrazení]]) |
* '''nepravá''' (pseudo-zobrazení) – odvozená z výše uvedených zobrazení azimutálních, kuželových a válcových (např. [[Mollweidovo zobrazení]]) |
||
*'''mnohokuželová''' (polykónická) – místo jednoho kuželového pláště je použita soustava kuželů |
* '''mnohokuželová''' (polykónická) – místo jednoho kuželového pláště je použita soustava kuželů |
||
*'''zobrazení po vymezených částech''' – nejedná se vlastně o druh zobrazení, ale o opakování téhož způsobu zobrazení po malých územích, čímž je minimalizováno zkreslení |
* '''zobrazení po vymezených částech''' – nejedná se vlastně o druh zobrazení, ale o opakování téhož způsobu zobrazení po malých územích, čímž je minimalizováno zkreslení |
||
=== Mapová zobrazení podle polohy osy zobrazovací plochy === |
=== Mapová zobrazení podle polohy osy zobrazovací plochy === |
||
*'''normální''' (pólová) – osa válce nebo kužele je totožná s osou glóbu nebo se zobrazovací rovina dotýká [[Glóbus|glóbu]] na jednom [[geografický pól| |
* '''normální''' (pólová) – osa válce nebo kužele je totožná s osou glóbu nebo se zobrazovací rovina dotýká [[Glóbus|glóbu]] na jednom [[geografický pól|pólu]] |
||
*'''příčná''' (transverzální, rovníková) – osa válce nebo kužele leží v rovině [[Zemský rovník| |
* '''příčná''' (transverzální, rovníková) – osa válce nebo kužele leží v rovině [[Zemský rovník|rovníku]] nebo se zobrazovací rovina dotýká glóbu na rovníku |
||
*'''obecná''' (šikmá) – osa válce nebo kužele prochází středem glóbu, ale nesplývá s jeho osou ani neleží na rovníku nebo se zobrazovací rovina dotýká glóbu v libovolném bodě mezi pólem a rovníkem |
* '''obecná''' (šikmá) – osa válce nebo kužele prochází středem glóbu, ale nesplývá s jeho osou ani neleží na rovníku nebo se zobrazovací rovina dotýká glóbu v libovolném bodě mezi pólem a rovníkem |
||
== Reference == |
|||
<references /> |
|||
== Externí odkazy == |
== Externí odkazy == |
||
*{{commonscat|Map projections}} |
* {{commonscat|Map projections}} |
||
{{Portály|Geografie}} |
|||
{{Autoritní data}} |
|||
[[Kategorie:Kartografie]] |
[[Kategorie:Kartografie]] |
||
Aktuální verze z 7. 4. 2024, 00:13
Mapové zobrazení, často též kartografická projekce, je způsob, jakým se převádí zobrazení povrchu Země (či jiného nebeského tělesa) z trojrozměrného zakřiveného povrchu referenčního elipsoidu či koule do roviny. Výsledek takového geometrického či početního postupu nazýváme mapa. Nejčastěji bývá na mapě sever směrem nahoru, jih směrem dolů, východ směrem doprava a západ směrem doleva.
Mezi základní parametry kartografického zobrazení patří:[1]
- typ zobrazovací plochy,
- poloha osy zobrazovací plochy,
- a poloha středu promítání.
Kartografické zkreslení
[editovat | editovat zdroj]Protože povrch koule či elipsoidu není rozvinutelný do roviny (stejně jako nelze do roviny bez deformace rozvinout oloupanou slupku pomeranče), je zapotřebí převést jej na povrch některého geometrického objektu, jehož povrch do roviny rozvinutelný je. Takovými objekty jsou válec, kužel a také rovinná plocha sama. Převod kulové plochy do roviny znamená vždy tvarové zkreslení části obsažených informací. Ve výsledném rovinném zobrazení nemohou být současně zachovány všechny hlavní údaje – délky, úhly a plochy – vždy dochází ke zkreslení některého z nich (případně všech). Proto byla postupem času vyvinuta řada mapových zobrazení, z nichž každé klade důraz na jiný z důležitých údajů. Při vytváření map malých území (do několika set km²[zdroj?!]) je zkreslení téměř zanedbatelné, je-li však třeba zachytit na mapě větší oblast (kraj, stát, světadíl, oceán či celou Zemi), je nutné pečlivě volit mapové zobrazení tak, aby odpovídalo účelu mapy.
- Ukázka kartografického zkreslení
-
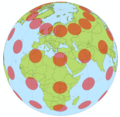 Tissotovy indikatrix rozmístěné pravidelně na povrchu Země.
Tissotovy indikatrix rozmístěné pravidelně na povrchu Země. -
 Ukázka zkreslení délek a ploch v oblasti pólů u Mercatorova zobrazení.
Ukázka zkreslení délek a ploch v oblasti pólů u Mercatorova zobrazení. -
 Ukázka zkreslení tvarů u Robinsonova zobrazení.
Ukázka zkreslení tvarů u Robinsonova zobrazení.



Nejznámější je Mercatorovo mapové zobrazení,[2] to je však kritizované za („kolonialistické“) zvětšení oblastí dále od rovníku.[3] Gall-Petersovo zobrazení ukazuje správné velikosti území, tvary a úhly ale neodpovídají skutečnosti. Kavrajského zobrazení bylo nejpoužívanější mapou v SSSR. Instituce National Geographic Society přešla roku 1988 na Robinsonovo zobrazení a v roce 1998 ho znovu nahradilo Winkelovým zobrazením, které minimalizuje všechny tři typy zkreslení: plochy, úhly i délky.[4] Richard Čapek z Přírodovědecké fakulty UK katedry kartografie a geoinformatiky a člen České geografické společnosti vytvořil žebříček nejlepších mapových zobrazení, z nejznámějších se umístilo: na čtvrtém místě Robinsonovo, na šestém Kavrajského a na devátém Winkelovo.[5]
Populární mapová zobrazení
[editovat | editovat zdroj]-
 Mercatorovo zobrazení (1569)
Mercatorovo zobrazení (1569) -
 Mollweidovo zobrazení (1805)
Mollweidovo zobrazení (1805) -
 Winkelovo zobrazení (Winkel III, 1921)
Winkelovo zobrazení (Winkel III, 1921) -
 Goodeho zobrazení (1923)
Goodeho zobrazení (1923) -
 Kavrajského zobrazení (Kavrayskij VII, 1939)
Kavrajského zobrazení (Kavrayskij VII, 1939) -
 Zobrazení Dymaxion (1954)
Zobrazení Dymaxion (1954) -
 Robinsonovo zobrazení (1963)
Robinsonovo zobrazení (1963) -
 Gall-Petersovo zobrazení (1973)
Gall-Petersovo zobrazení (1973)








Třídění mapových zobrazení
[editovat | editovat zdroj]
Mapová zobrazení podle kartografického zkreslení
[editovat | editovat zdroj]- ekvidistantní (délkojevná, stejnodélková) – nezkreslují vzdálenosti v určitém směru (netýká se všech délek)
- ekvivalentní (plochojevná, stejnoplochá) – zachovávají poměry ploch, jsou však zkresleny úhly
- konformní (úhlojevná, stejnoúhlá) – věrně zachycují úhly, ale silně zkreslují plochy
- vyrovnávací (kompenzační) – kompromisní zobrazení s mírným zkreslením úhlů i ploch; do této kategorie lze počítat i mnohá zobrazení délkojevná
Mapová zobrazení podle vzhledu zobrazovací plochy
[editovat | editovat zdroj]- jednoduchá
- azimutální – zobrazuje se přímo na rovinu (např. Gnómonická projekce)
- kuželová – zobrazuje se na plášť kužele, který se poté rozvine do roviny
- válcová – zobrazuje se na plášť válce, který se poté rozvine do roviny (např. Behrmannovo nebo Mercatorovo zobrazení)
- nepravá (pseudo-zobrazení) – odvozená z výše uvedených zobrazení azimutálních, kuželových a válcových (např. Mollweidovo zobrazení)
- mnohokuželová (polykónická) – místo jednoho kuželového pláště je použita soustava kuželů
- zobrazení po vymezených částech – nejedná se vlastně o druh zobrazení, ale o opakování téhož způsobu zobrazení po malých územích, čímž je minimalizováno zkreslení
Mapová zobrazení podle polohy osy zobrazovací plochy
[editovat | editovat zdroj]- normální (pólová) – osa válce nebo kužele je totožná s osou glóbu nebo se zobrazovací rovina dotýká glóbu na jednom pólu
- příčná (transverzální, rovníková) – osa válce nebo kužele leží v rovině rovníku nebo se zobrazovací rovina dotýká glóbu na rovníku
- obecná (šikmá) – osa válce nebo kužele prochází středem glóbu, ale nesplývá s jeho osou ani neleží na rovníku nebo se zobrazovací rovina dotýká glóbu v libovolném bodě mezi pólem a rovníkem
Reference
[editovat | editovat zdroj]- ↑ LAMBERT, Nicolas; ZANIN, Christine. Practical Handbook of Thematic Cartography. 1. vyd. [s.l.]: CRC PRESS, 2020. 211 s. Dostupné online. ISBN 978-0-367-26129-0, ISBN 978-0-429-29196-8. DOI 10.1201/9780429291968. OCLC 1354513003 S. 19–27. (anglicky)
- ↑ SNYDER, John Parr. Flattening the earth : two thousand years of map projections. [s.l.]: University of Chicago Press, 1997. ISBN 0226767477.
- ↑ https://www.businessinsider.com.au/boston-school-gall-peters-map-also-wrong-mercator-2017-3 Archivováno 18. 8. 2021 na Wayback Machine. - Some US schools have introduced a new world map — but it’s just as wrong as the one you’re familiar with
- ↑ SINGH, Ishveena. Which is the best map projection?. Geoawesomeness [online]. 2017-04-25 [cit. 2021-02-25]. Dostupné online. (anglicky)
- ↑ ČAPEK, Richard. Which is the best projection for the world map. In: Proceedings of the 20th international Cartographic Conference. [s.l.]: [s.n.], 2001. Dostupné online. (anglicky)
Externí odkazy
[editovat | editovat zdroj] Obrázky, zvuky či videa k tématu kartografické zobrazení na Wikimedia Commons
Obrázky, zvuky či videa k tématu kartografické zobrazení na Wikimedia Commons