Strategies and performance of the CMS silicon tracker alignment during LHC Run 2
- Tumasyan, Armen et al
- arXiv:2111.08757CMS-TRK-20-001CERN-EP-2021-203
 | Sketch showing the transverse view of a silicon module working in a magnetic field~$\mathrm{B}$, with the backplane of the module located at the bottom. Here, $x'$ and $z'$ are the local coordinates of the module. The grey lines in the shaded rectangle indicate the direction of the Lorentz drift, forming an angle~$\theta_\text{LA}$ with the $z'$~axis. The blue line represents a charged particle traversing the module with incident angle~$\theta_\text{trk}$, and the magenta shaded area represents the volume in which charge carriers released by the ionization drift towards the electrodes at the top of the module. The blue-cyan (orange-red) dot represents the reconstructed hit if the Lorentz drift is (is not) included in the reconstruction. An example of a reconstructed charge cluster is shown by the vertical magenta bars above the module. |
 | Sketch showing the transverse view of the Phase-0 barrel pixel subdetector, made of successive layers of silicon modules. The alternating orientation of the modules within each layer is indicated by the triangles. The blue (grey) circles represent the reconstructed hit positions using incorrect (correct) Lorentz angles in the presence of a magnetic field~$\mathrm{B}$. The grey curve corresponds to a track built from the hits that were reconstructed with the correct Lorentz angles. Hits reconstructed with incorrect Lorentz angles are displaced in a direction defined by the orientation of the module, increasing the residual distance between the hits and the track. |
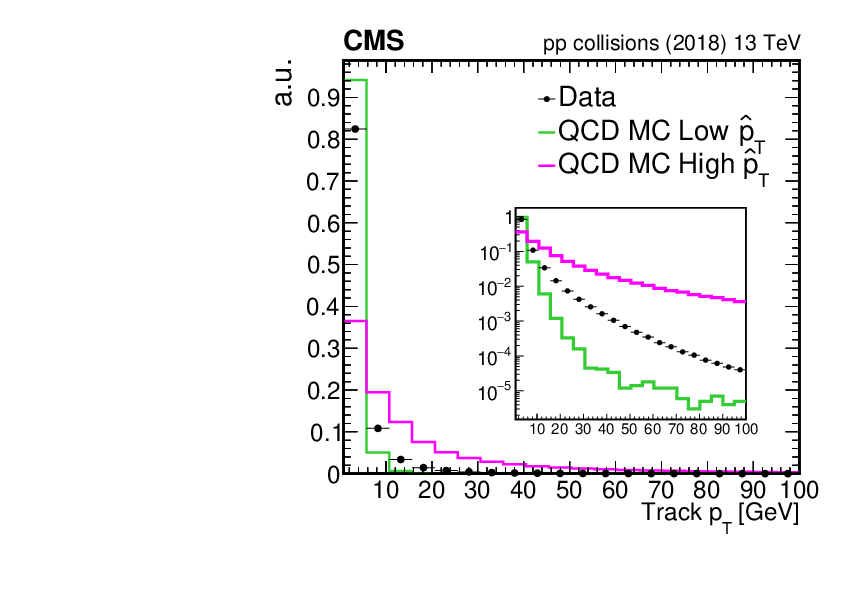 | Normalized track \pt (left) and $\eta$ (right) distributions for the inclusive L1 trigger (top), $\Ztomm$ (middle), and interfill cosmic ray muon (bottom) data sets in arbitrary units. Data collected with the CMS detector in 2018 and used for the final alignment in that year (solid black circles) are compared with the simulation (solid coloured lines). Distributions in data are obtained from a sample of $11\times 10^6$, $55\times 10^6$, and $3.4\times 10^6$ tracks for the inclusive L1 trigger, $\Ztomm$, and cosmic ray muon data sets, respectively. For the inclusive L1 trigger data set, data are compared with two sets of simulated QCD events with different ranges of transverse momentum transfers $\pthat$. The green line corresponds to $\pthat$ between 15 and 30\GeV, whereas the magenta line corresponds to $\pthat$ between 1000 and 1400\GeV. The inset in the \pt distribution of the inclusive L1 trigger data set (top left) shows the same distribution with a logarithmic scale for the $y$ axis. No correction for the limited modelling of the trigger efficiency in the simulation has been applied for the $\Ztomm$ data set. The statistical uncertainty is smaller than the symbol size and therefore imperceptible. |
 | Normalized track \pt (left) and $\eta$ (right) distributions for the inclusive L1 trigger (top), $\Ztomm$ (middle), and interfill cosmic ray muon (bottom) data sets in arbitrary units. Data collected with the CMS detector in 2018 and used for the final alignment in that year (solid black circles) are compared with the simulation (solid coloured lines). Distributions in data are obtained from a sample of $11\times 10^6$, $55\times 10^6$, and $3.4\times 10^6$ tracks for the inclusive L1 trigger, $\Ztomm$, and cosmic ray muon data sets, respectively. For the inclusive L1 trigger data set, data are compared with two sets of simulated QCD events with different ranges of transverse momentum transfers $\pthat$. The green line corresponds to $\pthat$ between 15 and 30\GeV, whereas the magenta line corresponds to $\pthat$ between 1000 and 1400\GeV. The inset in the \pt distribution of the inclusive L1 trigger data set (top left) shows the same distribution with a logarithmic scale for the $y$ axis. No correction for the limited modelling of the trigger efficiency in the simulation has been applied for the $\Ztomm$ data set. The statistical uncertainty is smaller than the symbol size and therefore imperceptible. |
 | Normalized track \pt (left) and $\eta$ (right) distributions for the inclusive L1 trigger (top), $\Ztomm$ (middle), and interfill cosmic ray muon (bottom) data sets in arbitrary units. Data collected with the CMS detector in 2018 and used for the final alignment in that year (solid black circles) are compared with the simulation (solid coloured lines). Distributions in data are obtained from a sample of $11\times 10^6$, $55\times 10^6$, and $3.4\times 10^6$ tracks for the inclusive L1 trigger, $\Ztomm$, and cosmic ray muon data sets, respectively. For the inclusive L1 trigger data set, data are compared with two sets of simulated QCD events with different ranges of transverse momentum transfers $\pthat$. The green line corresponds to $\pthat$ between 15 and 30\GeV, whereas the magenta line corresponds to $\pthat$ between 1000 and 1400\GeV. The inset in the \pt distribution of the inclusive L1 trigger data set (top left) shows the same distribution with a logarithmic scale for the $y$ axis. No correction for the limited modelling of the trigger efficiency in the simulation has been applied for the $\Ztomm$ data set. The statistical uncertainty is smaller than the symbol size and therefore imperceptible. |
 | Average event rates of cosmic ray muon data recorded with the CMS tracker during the years 2016, 2017, and 2018, obtained as explained in the text. The statistical uncertainty in the measured rates is negligible and is not shown in the figure. |
 | Diagram demonstrating distortions of the tracker geometry that may not affect the consistency of a reconstructed collision track with the measured hits (left), but introduce a kink when reconstructing the two halves of a cosmic ray muon track (right), leading to an inconsistency. This illustrates the telescope effect from Table~\ref{table:weakModes}. |
 | Diagram demonstrating the overlap regions of two representative modules $A$ and $B$. In the upper diagram, the predicted track impact points (green circles) and the actual hits with charge depositions (red and blue circles) do not coincide because of a wrong prediction of the module positions. In the lower diagram, the actual module positions are shown for the geometry with radial expansion, and the predicted impact points and hits coincide. Uncertainties due to track propagation are ignored in this illustration, but are greatly reduced in the difference of residuals as discussed in the text. The green dashed circles in the lower diagram indicate predicted impact points from the nominal geometry in the upper diagram. |
 | Diagram demonstrating the overlap regions of three representative modules $A$, $B$, and $C$ in the first layer of the barrel pixel detector. The $y$-$z$ view (left) and $y$-$x$ view (right) are shown for the same modules. The overlap hits are indicated with the blue (inner) and red (outer) crosses and appear in tracks with hits in two consecutive modules in the same layer of the detector. The black cross represents the interaction point. The overlap between modules $A$ and $B$ constrains the distance between modules in the $\phi$ direction, whereas the overlap between modules $A$ and $C$ constrains the distance between modules in the $z$ direction. |
 | Diagrams demonstrating distortions of the tracker geometry in the $r$-$z$ view (upper) and in the $x$-$y$ view (lower) with the reconstructed muon pair from a $\Ztomm$ decay. The invariant mass of the pair of muons deviates from the expected value and becomes a function of the track parameters. This illustrates the twist effect from Table~\ref{table:weakModes}. |
 | Validation of the nine basic systematic distortions summarized in Table~\ref{table:weakModes} using reconstructed MC simulations with five variations of the misalignment parameter $\epsilon$ in each case. The ideal geometry in MC simulation corresponds to $\epsilon=0$. The horizontal lines show the uncertainty on the average of a measurement in a given bin. The most sensitive validation out of cosmic ray muon track, overlap, or dimuon validation is employed in each case, as discussed in more detail in the text and as indicated in Table~\ref{table:weakModes}. In the bottom row, the formulae indicate the functional form of the fit used to extract the parameter quoted in the legend, which can be used to quantify the distortion. The convention for the sign of $\epsilon$ is discussed in the text and corresponds to a distortion in the geometry used for the reconstruction of MC events. This is opposite to the sign of the distortion if it were to be introduced in simulation of the detector components traversed by the charged particles. |
 | Validation of the nine basic systematic distortions summarized in Table~\ref{table:weakModes} using reconstructed MC simulations with five variations of the misalignment parameter $\epsilon$ in each case. The ideal geometry in MC simulation corresponds to $\epsilon=0$. The horizontal lines show the uncertainty on the average of a measurement in a given bin. The most sensitive validation out of cosmic ray muon track, overlap, or dimuon validation is employed in each case, as discussed in more detail in the text and as indicated in Table~\ref{table:weakModes}. In the bottom row, the formulae indicate the functional form of the fit used to extract the parameter quoted in the legend, which can be used to quantify the distortion. The convention for the sign of $\epsilon$ is discussed in the text and corresponds to a distortion in the geometry used for the reconstruction of MC events. This is opposite to the sign of the distortion if it were to be introduced in simulation of the detector components traversed by the charged particles. |
 | Validation of the nine basic systematic distortions summarized in Table~\ref{table:weakModes} using reconstructed MC simulations with five variations of the misalignment parameter $\epsilon$ in each case. The ideal geometry in MC simulation corresponds to $\epsilon=0$. The horizontal lines show the uncertainty on the average of a measurement in a given bin. The most sensitive validation out of cosmic ray muon track, overlap, or dimuon validation is employed in each case, as discussed in more detail in the text and as indicated in Table~\ref{table:weakModes}. In the bottom row, the formulae indicate the functional form of the fit used to extract the parameter quoted in the legend, which can be used to quantify the distortion. The convention for the sign of $\epsilon$ is discussed in the text and corresponds to a distortion in the geometry used for the reconstruction of MC events. This is opposite to the sign of the distortion if it were to be introduced in simulation of the detector components traversed by the charged particles. |
 | Validation of the nine basic systematic distortions summarized in Table~\ref{table:weakModes} using reconstructed MC simulations with five variations of the misalignment parameter $\epsilon$ in each case. The ideal geometry in MC simulation corresponds to $\epsilon=0$. The horizontal lines show the uncertainty on the average of a measurement in a given bin. The most sensitive validation out of cosmic ray muon track, overlap, or dimuon validation is employed in each case, as discussed in more detail in the text and as indicated in Table~\ref{table:weakModes}. In the bottom row, the formulae indicate the functional form of the fit used to extract the parameter quoted in the legend, which can be used to quantify the distortion. The convention for the sign of $\epsilon$ is discussed in the text and corresponds to a distortion in the geometry used for the reconstruction of MC events. This is opposite to the sign of the distortion if it were to be introduced in simulation of the detector components traversed by the charged particles. |
 | Validation of the nine basic systematic distortions summarized in Table~\ref{table:weakModes} using reconstructed MC simulations with five variations of the misalignment parameter $\epsilon$ in each case. The ideal geometry in MC simulation corresponds to $\epsilon=0$. The horizontal lines show the uncertainty on the average of a measurement in a given bin. The most sensitive validation out of cosmic ray muon track, overlap, or dimuon validation is employed in each case, as discussed in more detail in the text and as indicated in Table~\ref{table:weakModes}. In the bottom row, the formulae indicate the functional form of the fit used to extract the parameter quoted in the legend, which can be used to quantify the distortion. The convention for the sign of $\epsilon$ is discussed in the text and corresponds to a distortion in the geometry used for the reconstruction of MC events. This is opposite to the sign of the distortion if it were to be introduced in simulation of the detector components traversed by the charged particles. |
 | Validation of the nine basic systematic distortions summarized in Table~\ref{table:weakModes} using reconstructed MC simulations with five variations of the misalignment parameter $\epsilon$ in each case. The ideal geometry in MC simulation corresponds to $\epsilon=0$. The horizontal lines show the uncertainty on the average of a measurement in a given bin. The most sensitive validation out of cosmic ray muon track, overlap, or dimuon validation is employed in each case, as discussed in more detail in the text and as indicated in Table~\ref{table:weakModes}. In the bottom row, the formulae indicate the functional form of the fit used to extract the parameter quoted in the legend, which can be used to quantify the distortion. The convention for the sign of $\epsilon$ is discussed in the text and corresponds to a distortion in the geometry used for the reconstruction of MC events. This is opposite to the sign of the distortion if it were to be introduced in simulation of the detector components traversed by the charged particles. |
 | Validation of the nine basic systematic distortions summarized in Table~\ref{table:weakModes} using reconstructed MC simulations with five variations of the misalignment parameter $\epsilon$ in each case. The ideal geometry in MC simulation corresponds to $\epsilon=0$. The horizontal lines show the uncertainty on the average of a measurement in a given bin. The most sensitive validation out of cosmic ray muon track, overlap, or dimuon validation is employed in each case, as discussed in more detail in the text and as indicated in Table~\ref{table:weakModes}. In the bottom row, the formulae indicate the functional form of the fit used to extract the parameter quoted in the legend, which can be used to quantify the distortion. The convention for the sign of $\epsilon$ is discussed in the text and corresponds to a distortion in the geometry used for the reconstruction of MC events. This is opposite to the sign of the distortion if it were to be introduced in simulation of the detector components traversed by the charged particles. |
 | Validation of the nine basic systematic distortions summarized in Table~\ref{table:weakModes} using reconstructed MC simulations with five variations of the misalignment parameter $\epsilon$ in each case. The ideal geometry in MC simulation corresponds to $\epsilon=0$. The horizontal lines show the uncertainty on the average of a measurement in a given bin. The most sensitive validation out of cosmic ray muon track, overlap, or dimuon validation is employed in each case, as discussed in more detail in the text and as indicated in Table~\ref{table:weakModes}. In the bottom row, the formulae indicate the functional form of the fit used to extract the parameter quoted in the legend, which can be used to quantify the distortion. The convention for the sign of $\epsilon$ is discussed in the text and corresponds to a distortion in the geometry used for the reconstruction of MC events. This is opposite to the sign of the distortion if it were to be introduced in simulation of the detector components traversed by the charged particles. |
 | Validation of the nine basic systematic distortions summarized in Table~\ref{table:weakModes} using reconstructed MC simulations with five variations of the misalignment parameter $\epsilon$ in each case. The ideal geometry in MC simulation corresponds to $\epsilon=0$. The horizontal lines show the uncertainty on the average of a measurement in a given bin. The most sensitive validation out of cosmic ray muon track, overlap, or dimuon validation is employed in each case, as discussed in more detail in the text and as indicated in Table~\ref{table:weakModes}. In the bottom row, the formulae indicate the functional form of the fit used to extract the parameter quoted in the legend, which can be used to quantify the distortion. The convention for the sign of $\epsilon$ is discussed in the text and corresponds to a distortion in the geometry used for the reconstruction of MC events. This is opposite to the sign of the distortion if it were to be introduced in simulation of the detector components traversed by the charged particles. |
 | Diagram of the \HIPPY algorithm design with the sequence for event, track, and hit selection, including application of the weight factors and constraints. Not all features were used in the Run~2 alignment procedure, as described in the text. The algorithm operates in iterative mode, indicated with the arrows. |
 | Comparison of the positions of the modules in the first IOV of Run~2 and the last IOV of Run~1 in the BPIX (left) and FPIX (right) detectors, determined using cosmic data collected with 0\unit{T} and 3.8\unit{T} magnetic field in the solenoid and collision data at 0\unit{T}~\cite{CMS-DP-2015-029}. The differences in position $\Delta y$ (Run~2 $-$ Run~1) and $\Delta z$ (Run~2 $-$ Run~1) of the sensor modules are shown as a function of $\phi$ in global coordinates. Modules on the $-z$ side are shown in red, modules on the $+z$ side are shown in black. |
 | Comparison of the positions of the modules in the first IOV of Run~2 and the last IOV of Run~1 in the BPIX (left) and FPIX (right) detectors, determined using cosmic data collected with 0\unit{T} and 3.8\unit{T} magnetic field in the solenoid and collision data at 0\unit{T}~\cite{CMS-DP-2015-029}. The differences in position $\Delta y$ (Run~2 $-$ Run~1) and $\Delta z$ (Run~2 $-$ Run~1) of the sensor modules are shown as a function of $\phi$ in global coordinates. Modules on the $-z$ side are shown in red, modules on the $+z$ side are shown in black. |
 | DMRs for the local~$x$ coordinate in the BPIX (left) and TIB (right), evaluated using $2\times 10^6$ cosmic ray muon tracks collected at 3.8\unit{T} (top) and $1.8\times10^6$ tracks from collision data at 0\unit{T} (bottom). The alignment constants used to fit the tracks were determined successively from cosmic data at 3.8\unit{T} (green line) and, after the magnet was switched off, from 0\unit{T} cosmics and collision data (black line) as described in the text. Because of the detector movements caused by the change in the magnetic field, the alignment constants derived with 3.8\unit{T} data (green line) are not optimal for the track fits in the 0\unit{T} data (bottom row). The blue line shows the DMR computed assuming the Run~1 geometry, which is no longer valid for Run~2 data. |
 | DMRs for the local~$x$ coordinate in the BPIX (left) and TIB (right), evaluated using $2\times 10^6$ cosmic ray muon tracks collected at 3.8\unit{T} (top) and $1.8\times10^6$ tracks from collision data at 0\unit{T} (bottom). The alignment constants used to fit the tracks were determined successively from cosmic data at 3.8\unit{T} (green line) and, after the magnet was switched off, from 0\unit{T} cosmics and collision data (black line) as described in the text. Because of the detector movements caused by the change in the magnetic field, the alignment constants derived with 3.8\unit{T} data (green line) are not optimal for the track fits in the 0\unit{T} data (bottom row). The blue line shows the DMR computed assuming the Run~1 geometry, which is no longer valid for Run~2 data. |
 | DMRs for the local~$x$ coordinate in the BPIX (left) and TIB (right), evaluated using $2\times 10^6$ cosmic ray muon tracks collected at 3.8\unit{T} (top) and $1.8\times10^6$ tracks from collision data at 0\unit{T} (bottom). The alignment constants used to fit the tracks were determined successively from cosmic data at 3.8\unit{T} (green line) and, after the magnet was switched off, from 0\unit{T} cosmics and collision data (black line) as described in the text. Because of the detector movements caused by the change in the magnetic field, the alignment constants derived with 3.8\unit{T} data (green line) are not optimal for the track fits in the 0\unit{T} data (bottom row). The blue line shows the DMR computed assuming the Run~1 geometry, which is no longer valid for Run~2 data. |
 | DMRs for the local~$x$ coordinate in the BPIX (left) and TIB (right), evaluated using $2\times 10^6$ cosmic ray muon tracks collected at 3.8\unit{T} (top) and $1.8\times10^6$ tracks from collision data at 0\unit{T} (bottom). The alignment constants used to fit the tracks were determined successively from cosmic data at 3.8\unit{T} (green line) and, after the magnet was switched off, from 0\unit{T} cosmics and collision data (black line) as described in the text. Because of the detector movements caused by the change in the magnetic field, the alignment constants derived with 3.8\unit{T} data (green line) are not optimal for the track fits in the 0\unit{T} data (bottom row). The blue line shows the DMR computed assuming the Run~1 geometry, which is no longer valid for Run~2 data. |
 | Distribution of the difference between two halves of a cosmic ray muon track, scaled by a factor $\sqrt{2}$ to account for the two independent measurements. The track is split at the point of closest approach to the interaction region, in the $x$-$y$ (left) and $z$ (right) distance between the track and the origin. The tracks are fit using the alignment constants determined with cosmics at 0\unit{T} and 3.8\unit{T} (green circles) and using the Run~1 geometry (blue squares), which is no longer valid for Run~2 data. Vertical error bars represent the statistical uncertainty due to the limited number of tracks; they are smaller than the marker size. For comparison, the case of perfect alignment and calibration obtained from simulated events is shown (red line)~\cite{CMS-DP-2015-029}. |
 | Distribution of the difference between two halves of a cosmic ray muon track, scaled by a factor $\sqrt{2}$ to account for the two independent measurements. The track is split at the point of closest approach to the interaction region, in the $x$-$y$ (left) and $z$ (right) distance between the track and the origin. The tracks are fit using the alignment constants determined with cosmics at 0\unit{T} and 3.8\unit{T} (green circles) and using the Run~1 geometry (blue squares), which is no longer valid for Run~2 data. Vertical error bars represent the statistical uncertainty due to the limited number of tracks; they are smaller than the marker size. For comparison, the case of perfect alignment and calibration obtained from simulated events is shown (red line)~\cite{CMS-DP-2015-029}. |
 | Mean distance in the transverse plane of the track at its closest approach to a refit unbiased PV as a function of the track $\phi$ (left) and $\eta$ (right), measured in approximately $5.5\times 10^6$ collision events collected at 0\unit{T} magnetic field. Two different alignments are used to fit the tracks: the alignment constants obtained during the commissioning phase with cosmic ray muon tracks at 3.8\unit{T} prior to collision data taking (green circles) and the alignment constants determined subsequently with 0\unit{T} collision data (black squares). For comparison, the case of perfect alignment and calibration obtained from simulated data is shown (red line). Vertical error bars represent the statistical uncertainty due to the limited number of tracks; for the data, they are smaller than the size of the markers~\cite{CMS-DP-2015-029}. |
 | Mean distance in the transverse plane of the track at its closest approach to a refit unbiased PV as a function of the track $\phi$ (left) and $\eta$ (right), measured in approximately $5.5\times 10^6$ collision events collected at 0\unit{T} magnetic field. Two different alignments are used to fit the tracks: the alignment constants obtained during the commissioning phase with cosmic ray muon tracks at 3.8\unit{T} prior to collision data taking (green circles) and the alignment constants determined subsequently with 0\unit{T} collision data (black squares). For comparison, the case of perfect alignment and calibration obtained from simulated data is shown (red line). Vertical error bars represent the statistical uncertainty due to the limited number of tracks; for the data, they are smaller than the size of the markers~\cite{CMS-DP-2015-029}. |
 | Corrections after the first high-level structures alignment of the pixel detector in 2017, for the three FPIX disks (left) and the four BPIX layers (right). Shown are the differences of the module positions after the module-level alignment of the pixel detector, with respect to the ones considered before performing any alignment, as a function of the design positions. The alignments were performed with 0\unit{T} cosmic ray muon tracks. |
 | Corrections after the first high-level structures alignment of the pixel detector in 2017, for the three FPIX disks (left) and the four BPIX layers (right). Shown are the differences of the module positions after the module-level alignment of the pixel detector, with respect to the ones considered before performing any alignment, as a function of the design positions. The alignments were performed with 0\unit{T} cosmic ray muon tracks. |
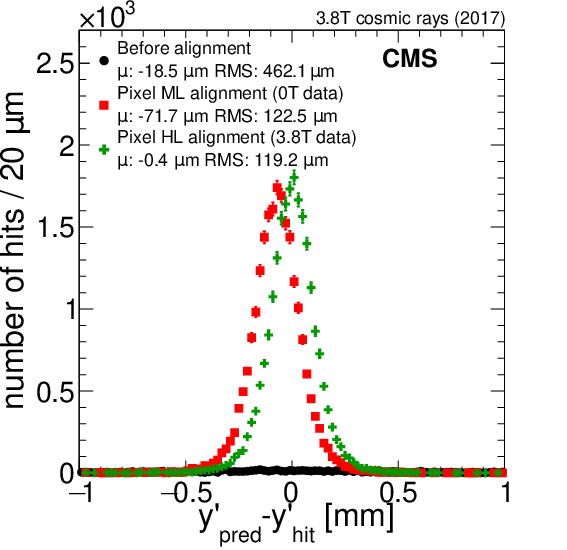
 | Unbiased track-hit residuals in the BPIX (left) and FPIX (right), in the local~$y$ ($y'$) coordinate. The distributions are shown for the different alignment iterations that were performed: the black circles indicate the geometry assumed before performing any alignment fit, the blue and cyan triangles show the high-level (HL) structures alignment of the barrel and forward pixel detectors, and the red squares represent the module-level (ML) alignment of the pixel detector. The mean ($\mu$) and RMS of the distributions are given in the legend. Vertical error bars represent the statistical uncertainty; they are smaller than the marker size in most of the cases. |
 | Unbiased track-hit residuals in the BPIX (left) and FPIX (right), in the local~$y$ ($y'$) coordinate. The distributions are shown for the different alignment iterations that were performed: the black circles indicate the geometry assumed before performing any alignment fit, the blue and cyan triangles show the high-level (HL) structures alignment of the barrel and forward pixel detectors, and the red squares represent the module-level (ML) alignment of the pixel detector. The mean ($\mu$) and RMS of the distributions are given in the legend. Vertical error bars represent the statistical uncertainty; they are smaller than the marker size in most of the cases. |
 | Distributions of the difference in reconstructed parameters between the two halves of a cosmic ray muon track, split at the point of closest approach to the interaction region: track $\eta$ (left) and $\phi$ (right) from a dataset recorded at 0\unit{T}. The difference is scaled by a factor $\sqrt{2}$ to account for the two independent measurements. The black circles show the geometry assumed before performing any alignment, the triangles show the FPIX and BPIX high-level (HL) structures alignment, and the red squares represent the module-level (ML) alignment of the pixel detector. The mean of the distributions ($\mu$) is given in the legend. Vertical error bars represent the statistical uncertainty; they are smaller than the marker size in most of the cases. |
 | Distributions of the difference in reconstructed parameters between the two halves of a cosmic ray muon track, split at the point of closest approach to the interaction region: track $\eta$ (left) and $\phi$ (right) from a dataset recorded at 0\unit{T}. The difference is scaled by a factor $\sqrt{2}$ to account for the two independent measurements. The black circles show the geometry assumed before performing any alignment, the triangles show the FPIX and BPIX high-level (HL) structures alignment, and the red squares represent the module-level (ML) alignment of the pixel detector. The mean of the distributions ($\mu$) is given in the legend. Vertical error bars represent the statistical uncertainty; they are smaller than the marker size in most of the cases. |
 | Performance of the 2017 CRAFT alignment fit (green crosses) compared with the geometry obtained after the alignment fit with 0\unit{T} cosmic ray muon tracks (red squares), and with the assumed geometry before performing any alignment (black circles). As an example, the track-hit residual distributions in the local~$y$ coordinate for the BPIX (left) and the difference in track $\eta$ from the cosmic ray muon track split validation (right) are shown. The mean ($\mu$) of the distributions is given in the legend. For the track-hit residual distributions, also the RMS is indicated. Vertical error bars represent the statistical uncertainty; they are smaller than the marker size in most of the cases. |
 | Performance of the 2017 CRAFT alignment fit (green crosses) compared with the geometry obtained after the alignment fit with 0\unit{T} cosmic ray muon tracks (red squares), and with the assumed geometry before performing any alignment (black circles). As an example, the track-hit residual distributions in the local~$y$ coordinate for the BPIX (left) and the difference in track $\eta$ from the cosmic ray muon track split validation (right) are shown. The mean ($\mu$) of the distributions is given in the legend. For the track-hit residual distributions, also the RMS is indicated. Vertical error bars represent the statistical uncertainty; they are smaller than the marker size in most of the cases. |
 | Observed movements of the six high-level structures in the pixel detector from the alignment procedure in the PCL for one arbitrary run in 2016. The two horizontal red lines in each of the figures show the threshold for triggering the deployment of a new set of alignment constants. The error bars represent the statistical uncertainties of the measurements. The orange bars in the figure showing the movement in the $z$~direction indicate that a sufficient movement to deploy a new set of alignment constants was observed. |
 | Observed movements of the six high-level structures in the pixel detector from the alignment procedure in the PCL for one arbitrary run in 2016. The two horizontal red lines in each of the figures show the threshold for triggering the deployment of a new set of alignment constants. The error bars represent the statistical uncertainties of the measurements. The orange bars in the figure showing the movement in the $z$~direction indicate that a sufficient movement to deploy a new set of alignment constants was observed. |
 | Observed movements of the six high-level structures in the pixel detector from the alignment procedure in the PCL for one arbitrary run in 2016. The two horizontal red lines in each of the figures show the threshold for triggering the deployment of a new set of alignment constants. The error bars represent the statistical uncertainties of the measurements. The orange bars in the figure showing the movement in the $z$~direction indicate that a sufficient movement to deploy a new set of alignment constants was observed. |
 | Observed movements of the six high-level structures in the pixel detector from the alignment procedure in the PCL for one arbitrary run in 2016. The two horizontal red lines in each of the figures show the threshold for triggering the deployment of a new set of alignment constants. The error bars represent the statistical uncertainties of the measurements. The orange bars in the figure showing the movement in the $z$~direction indicate that a sufficient movement to deploy a new set of alignment constants was observed. |
 | Observed movements of the six high-level structures in the pixel detector from the alignment procedure in the PCL for one arbitrary run in 2016. The two horizontal red lines in each of the figures show the threshold for triggering the deployment of a new set of alignment constants. The error bars represent the statistical uncertainties of the measurements. The orange bars in the figure showing the movement in the $z$~direction indicate that a sufficient movement to deploy a new set of alignment constants was observed. |
 | Observed movements of the six high-level structures in the pixel detector from the alignment procedure in the PCL for one arbitrary run in 2016. The two horizontal red lines in each of the figures show the threshold for triggering the deployment of a new set of alignment constants. The error bars represent the statistical uncertainties of the measurements. The orange bars in the figure showing the movement in the $z$~direction indicate that a sufficient movement to deploy a new set of alignment constants was observed. |
 | Observed movements in the $x$~direction of the two BPIX half cylinders, as functions of the delivered integrated luminosity, from the alignment procedure in the PCL. Each point corresponds to a single run and shows the movement proposed by the alignment fit with respect to the last deployed alignment. The alignment is only updated for future data taking if at least one of the six movements surpassed its corresponding threshold, otherwise it is not changed. The vertical bars on each point represent the statistical uncertainty of the measurement. The vertical black solid lines indicate the first processed runs for the 2016, 2017, and 2018 data-taking periods, respectively. The vertical dashed lines illustrate updates of the pixel detector calibration. The two horizontal lines show the threshold for triggering the deployment of a new set of alignment constants. The grey bands at the beginning of each year indicate runs where the automated alignment updates were not active. |
 | The value of the product $r\Delta\phi$ for each module in the pixel detector, comparing the alignment parameters of the alignment during data taking on 26 November 2017 and on 27 April 2018. These runs correspond to the last run of 2017 and the first run of 2018 after commissioning. During this transition, several modules of layer 1 of the BPIX were replaced (indicated in yellow frames), which explains the large movements with respect to their neighbouring modules. For each of the detector components, $r$ and $\phi$ correspond to the global coordinate, and $\Delta\phi$ is the shift in $\phi$ across the two alignments resulting in the physical shift $r\Delta\phi$ in the detector. |
 | Observed movements in the $x$~direction of the two BPIX half cylinders from the PCL alignment. The two vertical lines show the threshold for a new alignment to be triggered. The filled entries correspond to runs at the start of each year, where the automated updates of the alignment were not active. The percentage of the runs for which a new alignment was triggered by the movement in the $x$~direction is displayed below the legend in both figures. In the calculation of this percentage, the filled entries are not included. |
 | Observed movements in the $x$~direction of the two BPIX half cylinders from the PCL alignment. The two vertical lines show the threshold for a new alignment to be triggered. The filled entries correspond to runs at the start of each year, where the automated updates of the alignment were not active. The percentage of the runs for which a new alignment was triggered by the movement in the $x$~direction is displayed below the legend in both figures. In the calculation of this percentage, the filled entries are not included. |
 | Observed movements in the $x$~direction of the six high-level structures, as functions of the run number from the alignment procedure in the PCL for the data-taking period between 16~August and 5~December 2016. Each point corresponds to a run that triggered an update of the alignment parameters caused by a sufficient change in one of the three positions or rotations. The movements are shown without uncertainties. The vertical dashed lines illustrate the deployments of new sets of alignment constants. The two horizontal lines show the threshold for a new alignment to be triggered. The grey shaded regions indicate runs during which the magnet was not at 3.8\unit{T} (magnet cycle). After each of the two magnet cycles a large movement is observed for the very first run after the cycle. |
 | Distributions of per-module median track-hit residuals in the local~$x$ ($x'$) coordinate, for two subdetectors (BPIX and TID), produced with the single-muon data set. The distributions are averaged over all IOVs, where each IOV is weighted with the corresponding delivered integrated luminosity. The DMRs are shown for three different geometries in data. They are compared with the realistic MC scenario (black line) and the design MC scenario (magenta) evaluated in simulated isolated-muon events. The quoted means~$\mu$ and standard deviations~$\sigma$ are the parameters of a Gaussian fit to the distributions. |
 | Distributions of per-module median track-hit residuals in the local~$x$ ($x'$) coordinate, for two subdetectors (BPIX and TID), produced with the single-muon data set. The distributions are averaged over all IOVs, where each IOV is weighted with the corresponding delivered integrated luminosity. The DMRs are shown for three different geometries in data. They are compared with the realistic MC scenario (black line) and the design MC scenario (magenta) evaluated in simulated isolated-muon events. The quoted means~$\mu$ and standard deviations~$\sigma$ are the parameters of a Gaussian fit to the distributions. |
 | The DMR trends for the years 2016--2018, as functions of the delivered integrated luminosity, evaluated with a sample of data recorded by the inclusive L1 trigger. The upper figure shows the mean value of the distribution of median residuals for the local~$x$ ($x'$) coordinate in the BPIX detector. The lower figure shows the difference between the mean values $\Delta\mu$ obtained separately for the modules with the electric field pointing radially inwards or outwards. This quantity is also shown in the $x'$~coordinate. The shaded band indicates one standard deviation from the Gaussian fit of the corresponding DMR. |
 | The DMR trends for the years 2016--2018, as functions of the delivered integrated luminosity, evaluated with a sample of data recorded by the inclusive L1 trigger. The upper figure shows the mean value of the distribution of median residuals for the local~$x$ ($x'$) coordinate in the BPIX detector. The lower figure shows the difference between the mean values $\Delta\mu$ obtained separately for the modules with the electric field pointing radially inwards or outwards. This quantity is also shown in the $x'$~coordinate. The shaded band indicates one standard deviation from the Gaussian fit of the corresponding DMR. |
 | The value of $\Delta\phi$ for each module in the pixel detector, comparing the alignment parameters of the legacy reprocessing on 3 and 10 August 2017 (left) and comparing the alignment based on MC simulation for 2017 and the ideal detector (right). For each of the detector components, $\phi$ corresponds to the global coordinate. The colours denote the value of the $\Delta\phi$ movement, as shown by the bar at the bottom. These values are capped between $-0.15$ and 0.15\unit{mrad} for the alignments in data (left) and between $-0.05$ and 0.05\unit{mrad} for simulation (right). In the figure on the right, modules that were inactive in the simulation are indicated in dark grey. The alternating pattern visible in layer~1 of the BPIX is caused by radiation damage that is absorbed in the modules between local calibration updates of the pixel modules. Due to the opposite orientations of the neighbouring ladders, an alternating pattern is created. Radiation damage is more severe in the first layer which is closer to the interaction point, making the pattern more visible. |
 | The value of $\Delta\phi$ for each module in the pixel detector, comparing the alignment parameters of the legacy reprocessing on 3 and 10 August 2017 (left) and comparing the alignment based on MC simulation for 2017 and the ideal detector (right). For each of the detector components, $\phi$ corresponds to the global coordinate. The colours denote the value of the $\Delta\phi$ movement, as shown by the bar at the bottom. These values are capped between $-0.15$ and 0.15\unit{mrad} for the alignments in data (left) and between $-0.05$ and 0.05\unit{mrad} for simulation (right). In the figure on the right, modules that were inactive in the simulation are indicated in dark grey. The alternating pattern visible in layer~1 of the BPIX is caused by radiation damage that is absorbed in the modules between local calibration updates of the pixel modules. Due to the opposite orientations of the neighbouring ladders, an alternating pattern is created. Radiation damage is more severe in the first layer which is closer to the interaction point, making the pattern more visible. |
 | Mean track-vertex impact parameter in the transverse plane $\dxy$ (left) and in the longitudinal plane $\dz$ (right), as a function of track $\phi$ (top) and $\eta$ (bottom). The impact parameters are obtained by recalculating the vertex position after removal of the track under scrutiny and considering the impact parameter of this removed track. Only tracks with $\pt > 3 \GeV$ are considered. These distributions are averaged over all runs of 2016, 2017, and 2018 after scaling them with the corresponding delivered integrated luminosity for each run. Three alignment geometries in data are compared with the realistic MC alignment scenario evaluated in a sample of simulated inclusive L1 trigger events (black points) scaled to the corresponding luminosity delivered in 2016, 2017, and 2018. The error bars represent the statistical uncertainties due to the limited number of tracks. In case of data points statistical uncertainties are smaller than size of the displayed markers. |
 | Impact parameter trends in the transverse plane~$\dxy$ as a function of the delivered integrated luminosity. Only tracks with $\pt > 3 \GeV$ are considered. The upper figure shows the average $\dxy$; the lower figure shows its RMS in bins of the track $\eta$. |
 | Impact parameter trends in the transverse plane~$\dxy$ as a function of the delivered integrated luminosity. Only tracks with $\pt > 3 \GeV$ are considered. The upper figure shows the average $\dxy$; the lower figure shows its RMS in bins of the track $\eta$. |
 | Primary vertex resolution in the $x$ (top) and $z$ (bottom) directions, calculated using refitted vertices with $\sum \pt > 200 \GeV$ ($x$) and $\sum \pt > 400 \GeV$ ($z$) in $\pp$~collisions. The vertical black lines indicate the first processed runs for the 2016, 2017, and 2018 data-taking periods. The vertical dotted lines indicate changes in the pixel tracker calibration. |
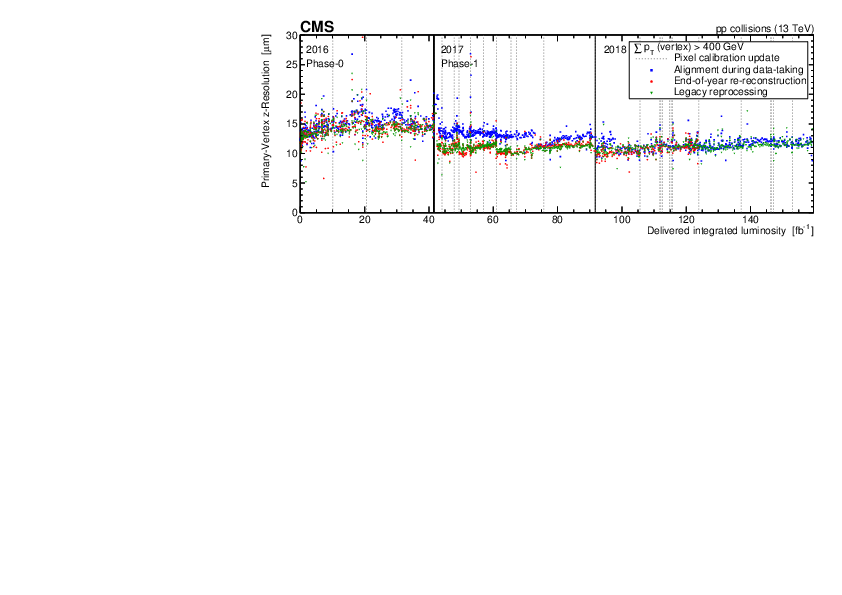 | Primary vertex resolution in the $x$ (top) and $z$ (bottom) directions, calculated using refitted vertices with $\sum \pt > 200 \GeV$ ($x$) and $\sum \pt > 400 \GeV$ ($z$) in $\pp$~collisions. The vertical black lines indicate the first processed runs for the 2016, 2017, and 2018 data-taking periods. The vertical dotted lines indicate changes in the pixel tracker calibration. |
 | Reconstructed \PZ~boson mass as a function of the difference in $\eta$ between the positively and negatively charged muons, calculated from the full sample of dimuon events in the years 2016, 2017, and 2018. The error bars show the standard deviation of the invariant \PZ~boson mass as retrieved from a fit of dimuon mass distribution to a Breit-Wigner convolved with a Crystal Ball function. |
 | The upper figure shows the invariant mass of the dimuon system, as a function of the azimuthal angle of the positively charged track for a single~IOV. The lower figure shows the amplitude $A$, obtained by fitting the invariant mass of the dimuon system versus $\phimup$ with a function of the form $A \cos{\left(\phi + \phi_{0}\right)} + b$ as a function of the delivered integrated luminosity. The vertical bars on the points in the upper figure show the uncertainty in the average $\mmumu$ of a given $\phimup$ bin. The shaded bands in the lower figure show the uncertainty in the fitted parameters calculated by a $\chi^2$ regression. |
 | The upper figure shows the invariant mass of the dimuon system, as a function of the azimuthal angle of the positively charged track for a single~IOV. The lower figure shows the amplitude $A$, obtained by fitting the invariant mass of the dimuon system versus $\phimup$ with a function of the form $A \cos{\left(\phi + \phi_{0}\right)} + b$ as a function of the delivered integrated luminosity. The vertical bars on the points in the upper figure show the uncertainty in the average $\mmumu$ of a given $\phimup$ bin. The shaded bands in the lower figure show the uncertainty in the fitted parameters calculated by a $\chi^2$ regression. |
 | Performance results for cosmic ray muon tracks recorded during commissioning and interfill runs at 3.8\unit{T} during 2016, 2017, and 2018. The top and bottom halves of the cosmic ray track are reconstructed independently and the track parameters are compared at the point of closest approach to the interaction region. The mean and RMS of the distribution of $\Delta\eta$ relative to its uncertainty are shown in the figure on the left. The mean $\eta$~difference between the two tracks is presented as a function of $\dxy$ on the right, scaled down by $\sqrt{2}$ to account for the two independent measurements. The error bars show the statistical uncertainty related to the limited number of tracks. |
 | Performance results for cosmic ray muon tracks recorded during commissioning and interfill runs at 3.8\unit{T} during 2016, 2017, and 2018. The top and bottom halves of the cosmic ray track are reconstructed independently and the track parameters are compared at the point of closest approach to the interaction region. The mean and RMS of the distribution of $\Delta\eta$ relative to its uncertainty are shown in the figure on the left. The mean $\eta$~difference between the two tracks is presented as a function of $\dxy$ on the right, scaled down by $\sqrt{2}$ to account for the two independent measurements. The error bars show the statistical uncertainty related to the limited number of tracks. |
 | The upper (lower) figure shows the mean difference in residuals in the $z$ ($\phi$)~direction for modules overlapping in the $z$ ($\phi$)~direction in the BPIX, $\langle \delta_z \rangle$ ($\langle \delta_\phi \rangle$), as a function of the delivered integrated luminosity. The error bars show the statistical uncertainty in the mean of distribution of the residuals. These residuals are calculated using a sample of data recorded with the inclusive L1 trigger. |
 | The upper (lower) figure shows the mean difference in residuals in the $z$ ($\phi$)~direction for modules overlapping in the $z$ ($\phi$)~direction in the BPIX, $\langle \delta_z \rangle$ ($\langle \delta_\phi \rangle$), as a function of the delivered integrated luminosity. The error bars show the statistical uncertainty in the mean of distribution of the residuals. These residuals are calculated using a sample of data recorded with the inclusive L1 trigger. |
 | The global $y$~coordinate of the barycentre position of the barrel pixel detector as a function of the delivered integrated luminosity, determined as the centre-of-gravity of the modules in the barrel pixel detector only. |
 | The contribution from the misalignment of the sensors to the total hit resolution for the inner ladders of the first (top) and second (bottom) BPIX layers in the local~$y$ coordinate as a function of the delivered integrated luminosity. For the legacy reprocessing, the measurements were performed with a higher granularity than in the other two cases. |
 | The contribution from the misalignment of the sensors to the total hit resolution for the inner ladders of the first (top) and second (bottom) BPIX layers in the local~$y$ coordinate as a function of the delivered integrated luminosity. For the legacy reprocessing, the measurements were performed with a higher granularity than in the other two cases. |
 | The contribution from the misalignment of the sensors to the total hit resolution in the local~$x$ coordinate for the tracker pixel detector (left) and the inner barrel region of the strip detector (right). These contributions are shown separately for the different module categories that characterize the hierarchical structure of each subdetector. |
 | The contribution from the misalignment of the sensors to the total hit resolution in the local~$x$ coordinate for the tracker pixel detector (left) and the inner barrel region of the strip detector (right). These contributions are shown separately for the different module categories that characterize the hierarchical structure of each subdetector. |
 | The distribution of the RMS of the normalized residuals in the local~$x$ coordinate ($x'$) for modules in the BPIX (left) and in the TID (right). The distributions evaluated in data are averaged over all IOVs, weighted by the integrated luminosity delivered in each IOV. The distributions in data are compared with an MC scenario with realistic alignment conditions for the legacy reprocessing and an MC scenario with ideal alignment conditions. An improvement is visible in the legacy reprocessing compared with the other two alignments shown; this is quantified by the quoted means $\mu$ of the distributions. |
 | Difference of module positions in the global $z$~coordinate as obtained in the 2018 MC alignment fit with respect to the ideal positions. The modules are given a colour corresponding to the value of $\Delta z$ according to the colour bar on the bottom. Modules that were inactive during the simulation are indicated in dark grey. A pattern typical for the $z$~expansion distortion can be observed in the TEC, with a maximum magnitude of approximately 200\mum. The effect of this systematic misalignment on the alignment performance is expected to be small. |
 | Distribution of the mean impact parameter in the transverse plane (left) and in the longitudinal plane (right) as a function of the track $\phi$ (top) and $\eta$ (bottom) for 2017. The derived MC scenario is compared with three representative IOVs from the year 2017 in data (18~July, 18~August, 5~October) to assess its validity as the final geometry. The error bars show the statistical uncertainty related to the limited number of tracks. |
 | The DMRs in the local~$x$ coordinate for different components of the tracker system. The derived MC scenario is compared with three representative IOVs from the year 2017 in data (18~July, 18~August, 5~October) to assess its validity as the final geometry. |
 | The DMRs in the local~$x$ coordinate for different components of the tracker system. The derived MC scenario is compared with three representative IOVs from the year 2017 in data (18~July, 18~August, 5~October) to assess its validity as the final geometry. |
 | The DMRs in the local~$x$ coordinate for different components of the tracker system. The derived MC scenario is compared with three representative IOVs from the year 2017 in data (18~July, 18~August, 5~October) to assess its validity as the final geometry. |
 | The DMRs in the local~$x$ coordinate for different components of the tracker system. The derived MC scenario is compared with three representative IOVs from the year 2017 in data (18~July, 18~August, 5~October) to assess its validity as the final geometry. |
 | Difference in the impact parameters in the longitudinal (left) and transverse (right) plane as evaluated in the cosmic ray muon track splitting validation. The derived MC scenario is compared with three representative IOVs from the year 2017 in data (18~July, 18~August, 5~October) to assess its validity as the final geometry. |
 | Difference in the impact parameters in the longitudinal (left) and transverse (right) plane as evaluated in the cosmic ray muon track splitting validation. The derived MC scenario is compared with three representative IOVs from the year 2017 in data (18~July, 18~August, 5~October) to assess its validity as the final geometry. |
 | Mean track-vertex impact parameter in the transverse plane (left) and in the longitudinal plane (right), as a function of the track $\phi$ (top) and $\eta$ (bottom). A comparison of the results with the alignment constants derived in the Run~2 legacy MC scenario for 2016, 2017, and 2018 separately is shown. The error bars show the statistical uncertainty related to the limited number of tracks. |
 | Distribution of the two-dimensional track impact parameter significance~(SIP2D) with respect to the PV. Data collected in 2016 (left) and 2017 (right) are compared with the corresponding MC simulation. For 2016, the simulation with old APV~settings is shown. For both data and simulation, the first and last bins include the underflow and overflow, respectively. Vertical error bars represent the statistical uncertainty due to the limited number of tracks; they are smaller than the marker size in both years. Tracks with very low $\chi^{2}$ probability values, related to pattern recognition errors, are not included in these figures. |
 | Distribution of the two-dimensional track impact parameter significance~(SIP2D) with respect to the PV. Data collected in 2016 (left) and 2017 (right) are compared with the corresponding MC simulation. For 2016, the simulation with old APV~settings is shown. For both data and simulation, the first and last bins include the underflow and overflow, respectively. Vertical error bars represent the statistical uncertainty due to the limited number of tracks; they are smaller than the marker size in both years. Tracks with very low $\chi^{2}$ probability values, related to pattern recognition errors, are not included in these figures. |
 | The distribution of the uncertainty in measuring the three-dimensional track impact parameter~(IP3D), with respect to the PV. Data collected in 2016 (left) and 2017 (right) are compared with the corresponding MC simulation. For 2016, the simulation with old APV~settings is shown. For both data and simulation, the last bins include the overflow. Vertical error bars represent the statistical uncertainty due to the limited number of tracks; they are smaller than the marker size in both years. Tracks with very low $\chi^{2}$ probability values, related to pattern recognition errors, are not included in these figures. |
 | The distribution of the uncertainty in measuring the three-dimensional track impact parameter~(IP3D), with respect to the PV. Data collected in 2016 (left) and 2017 (right) are compared with the corresponding MC simulation. For 2016, the simulation with old APV~settings is shown. For both data and simulation, the last bins include the overflow. Vertical error bars represent the statistical uncertainty due to the limited number of tracks; they are smaller than the marker size in both years. Tracks with very low $\chi^{2}$ probability values, related to pattern recognition errors, are not included in these figures. |
 | Distribution of the track $\chi^{2}$ probability for the number of degrees of freedom in the track fit. Data collected in 2016 (left) and 2017 (right) are compared with the corresponding MC simulation. For 2016, the simulation with old APV~settings is shown. Vertical error bars represent the statistical uncertainty due to the limited number of tracks; they are smaller than the marker size in both years. Some tracks have a very low $\chi^{2}$ probability value, below the dashed line, as a result of pattern recognition errors. Such tracks are excluded from the studies in this section. |
 | Distribution of the track $\chi^{2}$ probability for the number of degrees of freedom in the track fit. Data collected in 2016 (left) and 2017 (right) are compared with the corresponding MC simulation. For 2016, the simulation with old APV~settings is shown. Vertical error bars represent the statistical uncertainty due to the limited number of tracks; they are smaller than the marker size in both years. Some tracks have a very low $\chi^{2}$ probability value, below the dashed line, as a result of pattern recognition errors. Such tracks are excluded from the studies in this section. |